Innervation of Sensing Microchannels for Three-Dimensional Stimuli Perception
-
Stimuli perception enables animals and robots to interact with unknown environments safely and predictably. For the sensing of
soft robotics and wearable devices, although electronic skins have already been widely accepted and studied, their planar geometries
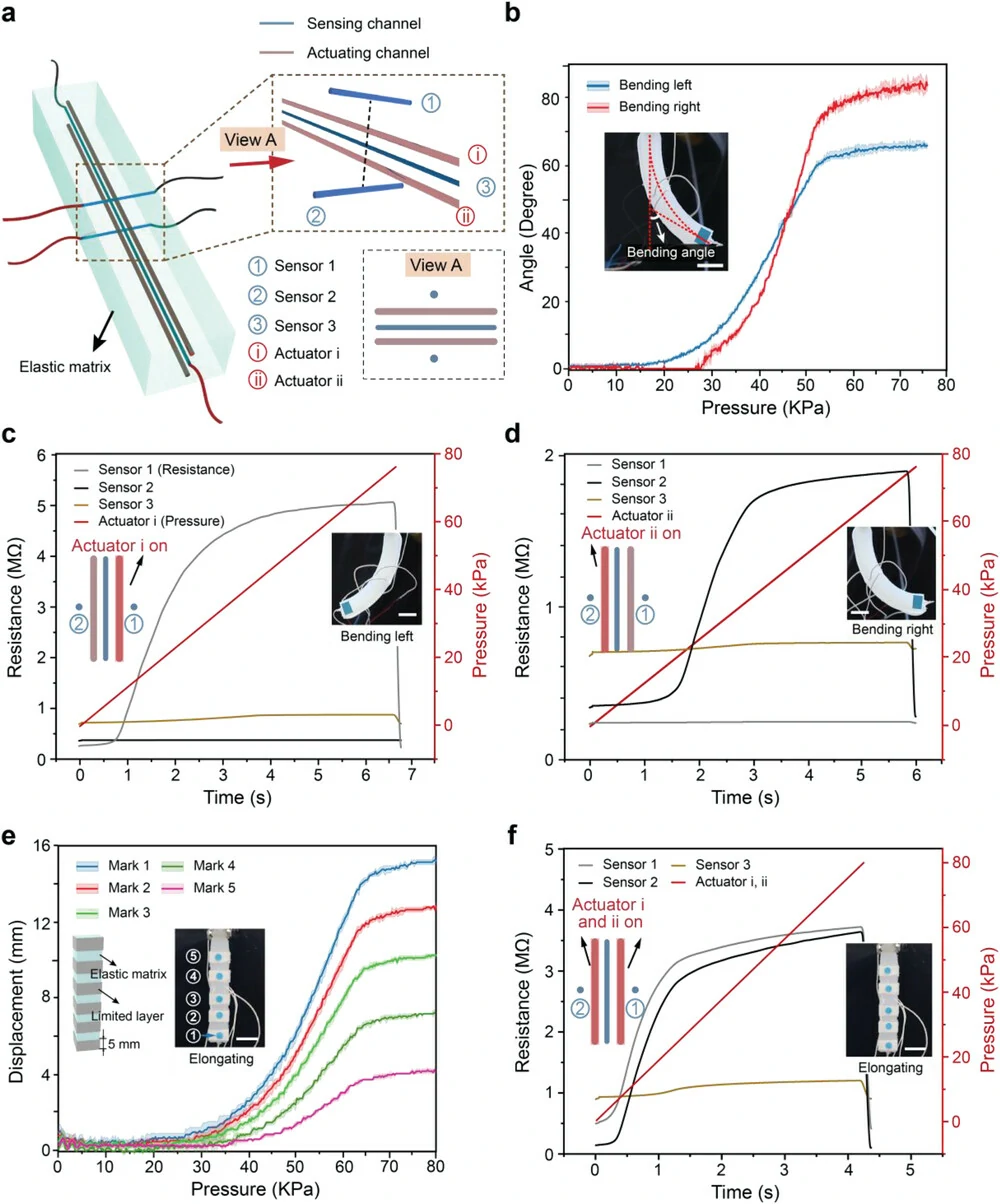
are not applicable for multi-direction volume sensing. Herein, the innervation of sensing microchannel networks into elastic
matrices to mimic the exteroception and proprioception of the human bodies is employed. Soft actuators with interlaced actuating
and sensing microchannels resembling the distribution of muscle fiber and proprioceptors are fabricated and the internal stimuli
perception of deformation configurations (bending, elongating, and bending directions) and magnitudes (bending angle and elongation)
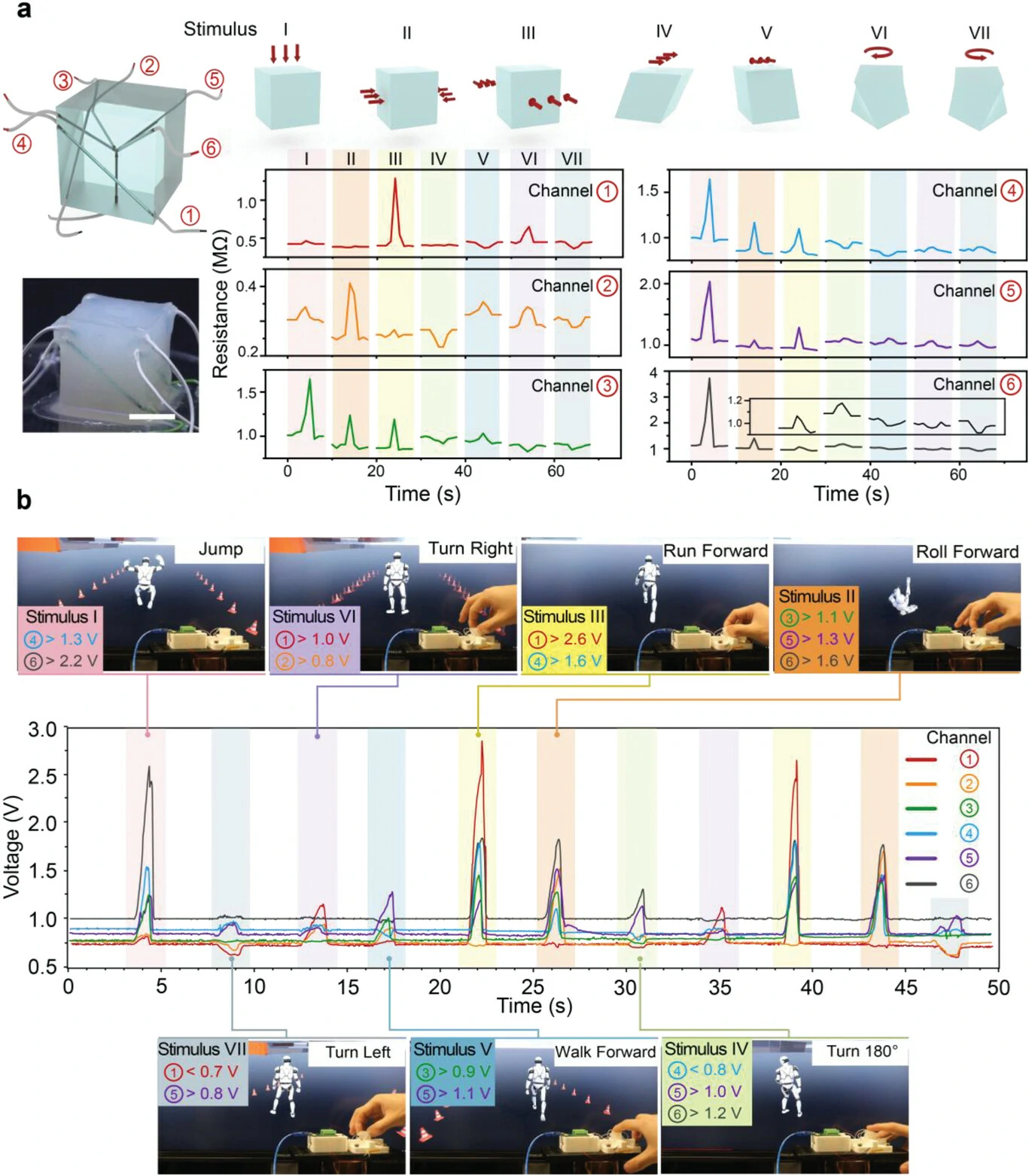
of the soft actuators are demonstrated. It is also demonstrated that a soft cubic sensor containing 3D microchannels (diameter: 400 µm)
is capable of identifying 3D external stimuli, including force types (pressing, squeezing, shearing, and twisting) and real-time
directions by measuring the resistance variation, and its application in the virtual reality field is exhibited.

Videos
Reference
Dongliang Fan†, Renjie Zhu†, Xin Yang, Hao Liu, Ting Wang, Peisong Wang, Wenyu Wu, Huacen Wang, Yunteng Ma, Jian S. Dai, and
Hongqiang Wang*.
Innervation of Sensing Microchannels for Three-Dimensional Stimuli Perception.
Advanced Materials Technologies
, Early Access.