2026
SUSTech Team Builds Novel Soft Humanoid Robot with Bone-inspired Deformation Technology
Professor Hongqiang WANG and his research team from the Department of Mechanical and Energy Engineering at Southern University of Science and Technology (SUSTech) made a significant breakthrough in the field of humanoid and bioinspired robotics. They successfully developed a novel bone-inspired deformable soft linkage based on pneumatic inflation structures and multidimensional stability mechanisms. Weighing just 350 grams, this linkage can achieve up to 315% extensibility while maintaining excellent load-bearing capacity, structural stability, and compliance. Leveraging this innovation, the team further developed the world’s first lightweight soft humanoid robot, named GrowHR, standing 1.36 meters tall and weighing only 4.5 kilograms, less than 20% of the weight of traditional humanoid robots of similar size.

2025
SUSTech students take first place in IEEE RoboSoft 2025 competition
The IEEE-RAS International Conference on Soft Robotics (RoboSoft 2025), organized by the Institute of Electrical and Electronics Engineers (IEEE) and hosted by the École Polytechnique Fédérale de Lausanne (EPFL), was recently held in Lausanne, Switzerland. Creeper, a student team from the Southern University of Science and Technology (SUSTech)—under the mentorship of Associate Professor Hongqiang WANG from the Department of Mechanical and Energy Engineering—participated in the finals and claimed first place in the In-pipe Locomotion competition.
New Publication
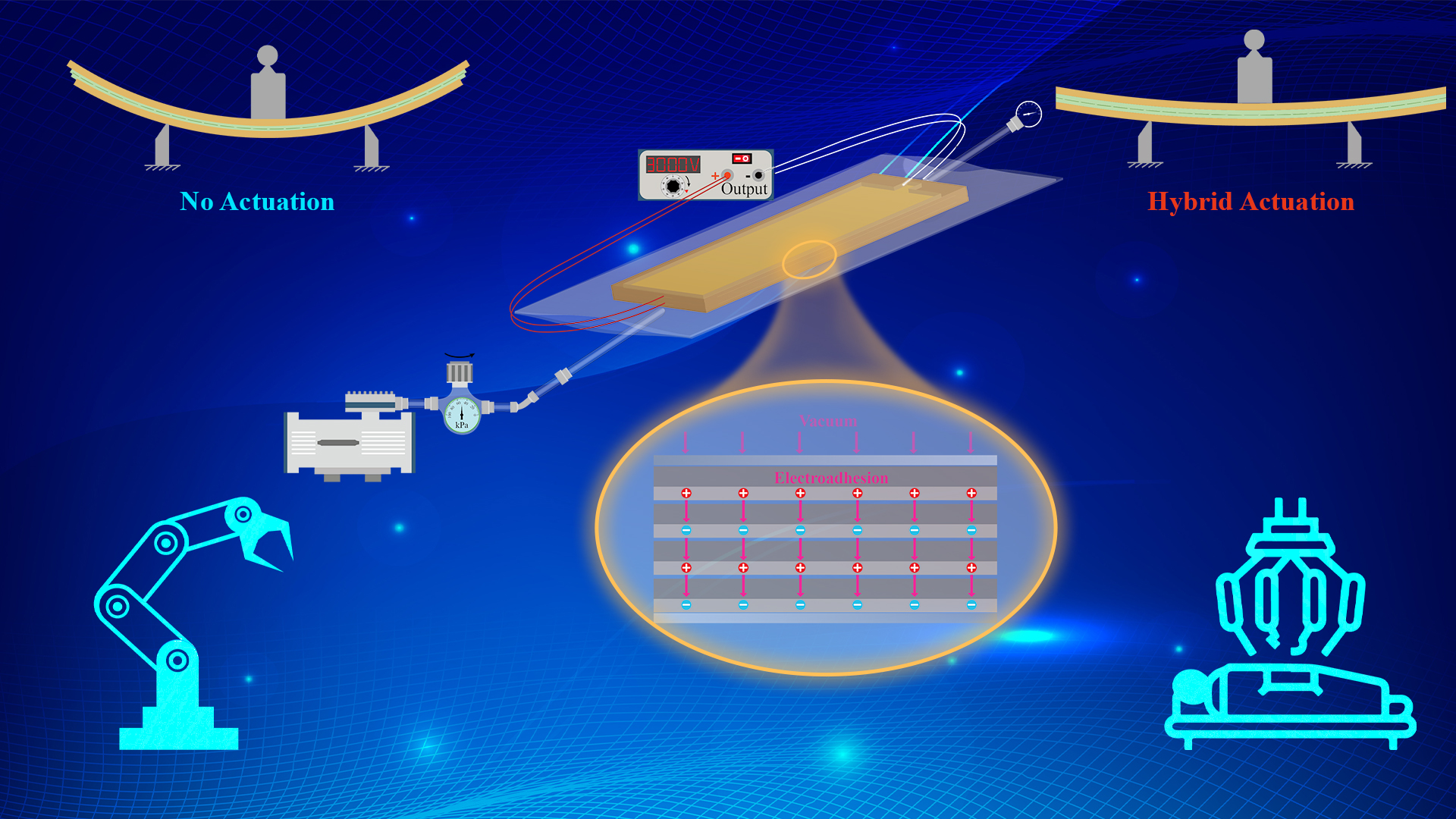
The variable stiffness technology shows its versatility in soft robotics and healthcare applications, such as compliant grippers, wearables, and exoskeletons. However, current mechanisms are limited by reliance on a single actuation source and a lack of theoretical understanding of the complicated mechanical behaviors, further impeding their broader application in robotics.
2024
Triumph for SUSTech students at IEEE RoboSoft 2024
The Institute of Electrical and Electronics Engineers (IEEE) recently hosted its 2024 IEEE International Conference on Soft Robotics (IEEE RoboSoft 2024) in San Diego, California, USA. SOFTech, a team from the Southern University of Science and Technology (SUSTech), under the mentorship of Hongqiang WANG, Associate Professor of the Department of Mechanical and Energy Engineering, participated in the finals, clinching the top spot in the Locomotion Group competition.

2023
Triumph for SUSTech students at IEEE RoboSoft 2024
The Institute of Electrical and Electronics Engineers (IEEE) recently hosted its 2024 IEEE International Conference on Soft Robotics (IEEE RoboSoft 2024) in San Diego, California, USA. SOFTech, a team from the Southern University of Science and Technology (SUSTech), under the mentorship of Hongqiang WANG, Associate Professor of the Department of Mechanical and Energy Engineering, participated in the finals, clinching the top spot in the Locomotion Group competition.
SUSTech hosts 8th Soft Robotics Symposium
From November 24 to 26, the 8th Soft Robotics Symposium on Basic Theory and Key Technology and Soft Robotics Innovation Design Competition was held at the Southern University of Science and Technology (SUSTech).
SUSTech’s Hongqiang WANG wins Xiong Youlun Zhihu Outstanding Young Scholar Award
From July 7 to 9, the 4th China Robotics Academic Annual Conference was held in Hangzhou, Zhejiang Province. Hongqiang WANG, Associate Professor of the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech), won the fifth Xiong Youlun Zhihu Outstanding Young Scholar Award.

New publication
As an emerging promising attachment technique, electrostatic adhesion has been extensively applied in soft robots, flying vehicles, wearable devices, grippers, and aerospace applications. Usually, it is composed of a conductive pad and an electroadhesive pad (EPad) consisting of a conductive layer covered by insulation, as shown in Figure 1a. Supplied with a high voltage, dislike charges induced in the conductive layer and the conductive pad generate attractive force. Nevertheless, the EPad suffers from unpredictable electrical breakdown due to defects in dielectric layers, which severely limits its practical applications. Once a short circuit happens accidentally, the whole device fails suddenly and cannot recover. In practice, to avoid electrical breakdown, the voltage is restricted to a magnitude much lower than the threshold acquired from tests and theories, which results in a much lower output force.

SUSTech students take second place in IEEE RoboSoft 2023 competition
The Southern University of Science and Technology (SUSTech) also took part in the finals, with their team, Pipe Finder, placing second in the RoboSoft Competition Locomotion Group under the guidance of Hongqiang WANG, Associate Professor of the Department of Mechanical and Energy Engineering at SUSTech. They were also the only Chinese team to come away from the competition with a prize.

New publication
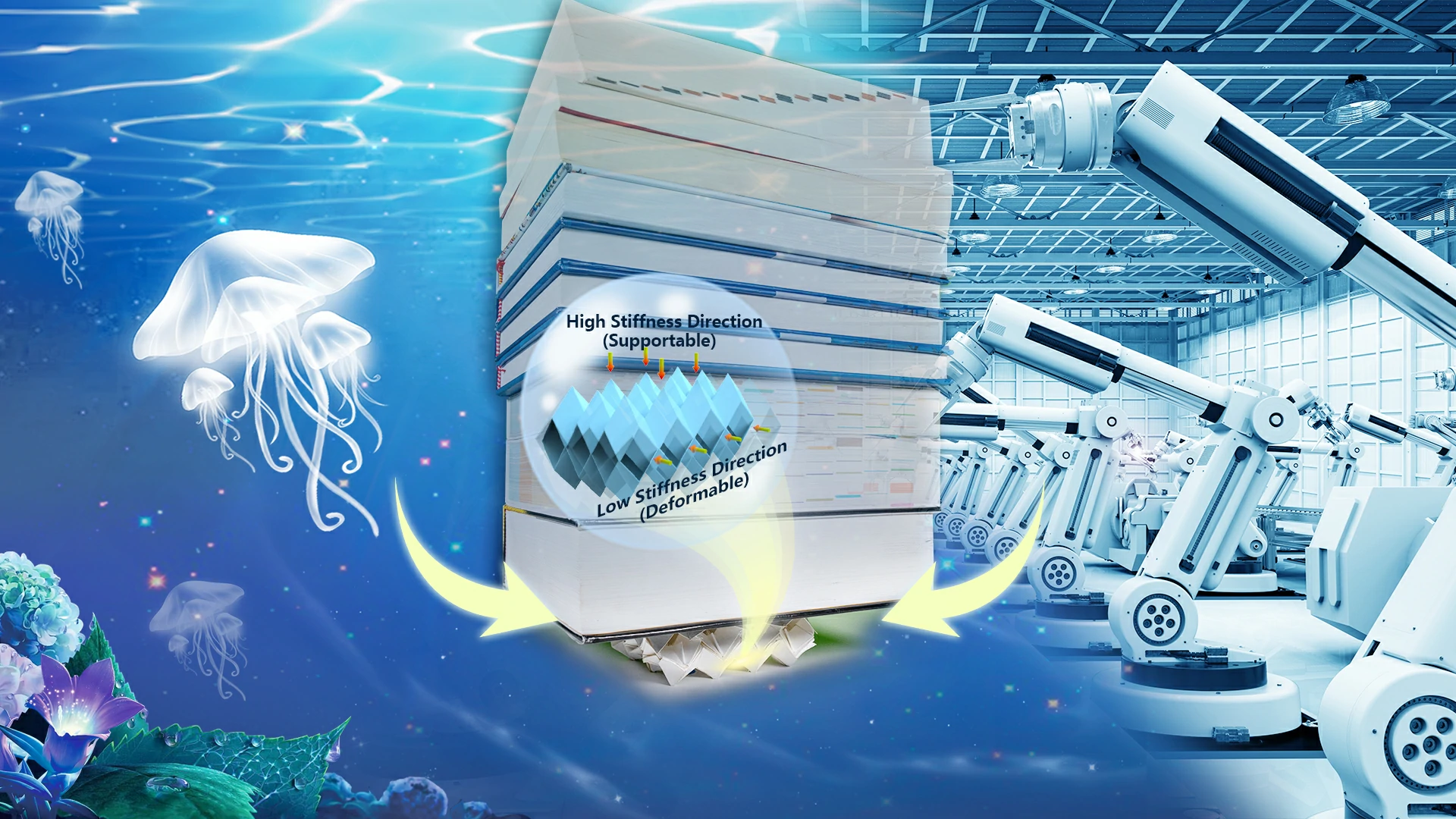
Compared to many rigid robots, emerging soft robots possess higher adaptability and safety owing to their compliance, making them a promising solution for human-robot interaction, manipulation, and search and rescue. Instead of only having one state (soft or rigid) in a robot, many scenarios necessitate both soft and rigid properties. For example, when picking an item of varying softness, shape, and weight using various motions, such as grasping and fiddling, a packaging robot should be rigid enough to grasp heavy items but soft enough to grasp fragile or irregular items while also being capable of quickly switching between these two states.
2022
New publication
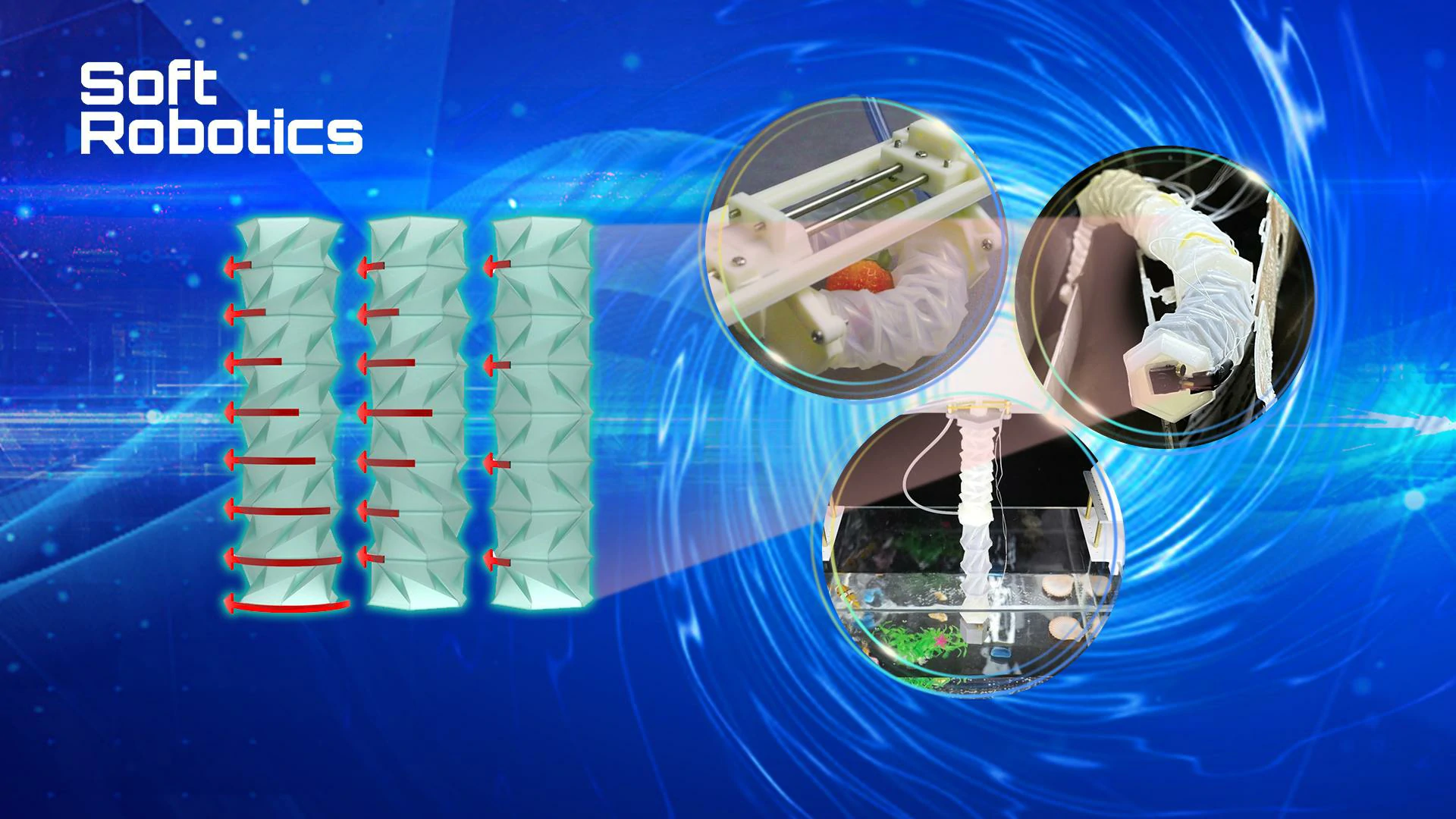
Soft robots, with high adaptability and deformation, are promising for safe human-robot interaction, dexterous manipulation, and inspection in a confined environment. Although the bending, expanding, and shrinking movements of soft robots have been widely studied, little research exists on twisting (torsional) soft actuators, resulting in a lack of robot motion degrees of freedom and missing part of the motion space, making it a major missing piece of the puzzle in current soft robot design.
New publication
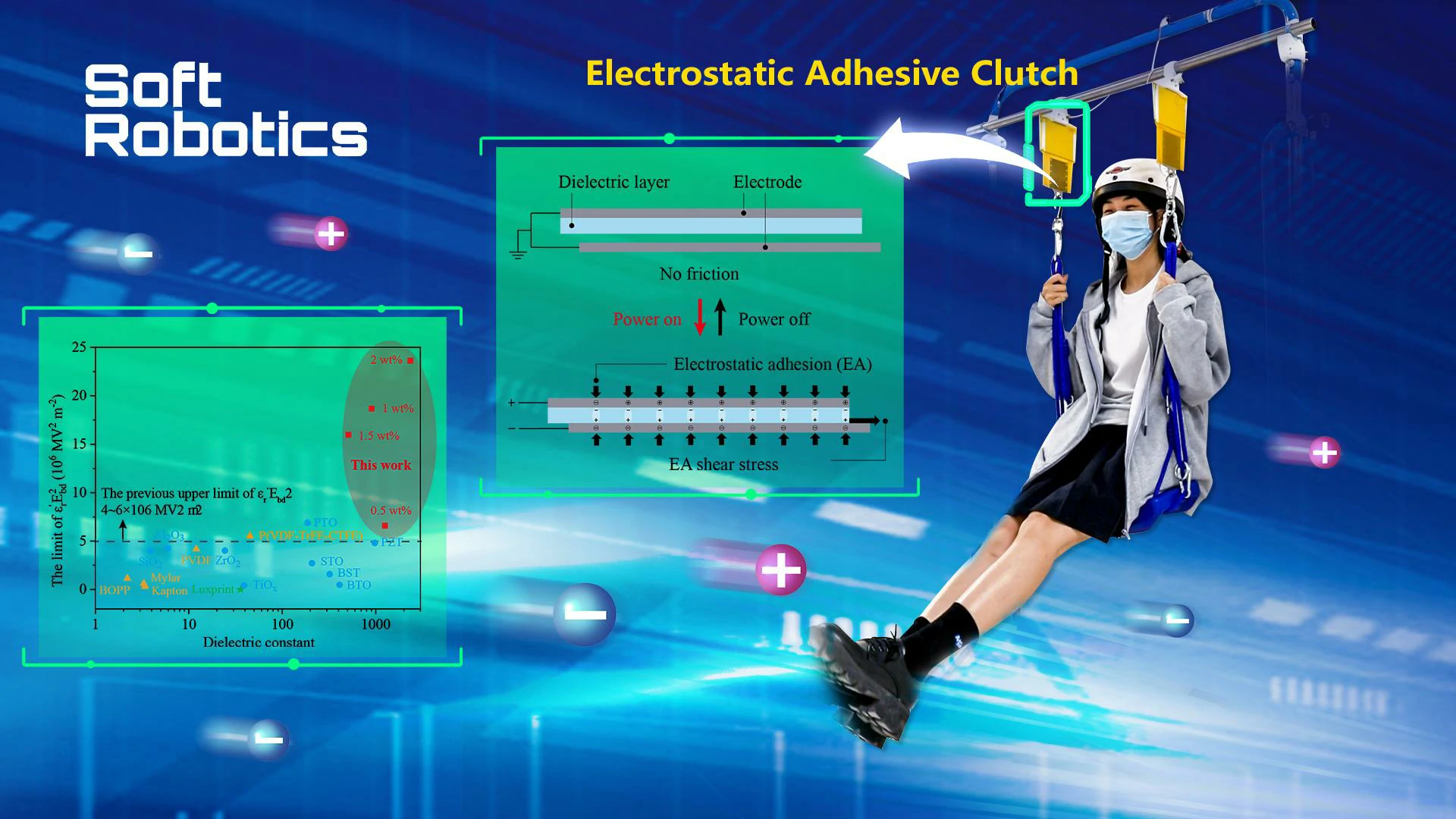
Electrostatic adhesion (EA) was an emerging adhering technique based on the electrostatic field in recent decades, which could be widely used in the fields of robotics, human-machine interaction, and wearable devices. The simplest EA device consists of two electrodes and a dielectric layer between them.
New publication
Inspired by the tension-induced necking phenomenon during the cold drawing process of the polymeric specimens, Associate Professor Hongqiang Wang's research group from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) proposed a simple and solvent-free fabrication method capable of producing monolithic microchannels with complex 3D structures, long length, and small diameter. Their paper, entitled “Self-shrinking soft demoulding for complex high-aspect-ratio microchannels,” was published in Nature Communication, a multidisciplinary journal covering the natural sciences, including physics, chemistry, earth sciences, medicine, and biology.
New publication
Associate Professor Hongqiang Wang's research group from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) has recently published a paper about an underactuated miniature robot driven by a single motor. Their research, entitled “SimoBot: An Underactuated Miniature Robot Driven by a Single Motor,” was published in IEEE Transactions on Mechatronics (TMech).

重磅|首届「良师益友」评选名单揭晓
首届“良师益友”优秀研究生导师评选活动由南方科技大学研究生院、党委研究生工作部主办,研究生会承办,于2022年4月27日发起。
本次活动历经预提名、正式提名、复评投票、结果审核等环节,共评选出10位“立德为首,学高为师,教益为优,育人为本”的优秀研究生导师。

南科大王宏强团队在全自动智能核酸采样机器人研制方面取得新进展
近日,南方科技大学机械与能源工程系(简称“机械系”)和机器人研究院副教授王宏强课题组在全自动智能核酸采样机器人研制方面取得新进展,该机器人主要应用于新型冠状肺炎病毒等呼吸道感染的咽拭子样本采集工作, 并于近日与深圳市宝安区人民医院合作进行了多人大规模测试,取得满意效果。
王宏强课题组积极投身于科研“抗疫”,针对新冠病毒核酸检测的样本采集开展了一系列研究工作。最早于2020年5月,就采用灵巧机构,研发出第一代“便携式咽拭子采集智能机器人”,研究团队与深圳市第三人民医院合作进 行了咽拭子采集临床试验,采样有效性得到验证。通过对生物力学、采样原理的深入研究,2021年3月,研究团队基于先进的视觉识别和力学传感技术,研制出了“视-触融合下的口咽拭子采样机器人(第二代)”,实现了从遥操作 采样模式到自动采样模式的升级。该样机能够实现预期功能,比如采样部位捕捉及定位,采样力度实时检测及交互控制。
2021年8月-至今,研究团队致力于研发新一代“安全、高效、低成本的全自动智能核酸采样机器人”(第三代),设计并研制出了样机,实现了从采集环节自动化到拭子装夹,拭子更换、样本收集、样本储藏和整机消毒等环节 的全流程自动化采样,单次装载可满足1000人份(混采)核酸采集,减轻了医务负担,弥补了医务工作者缺口。目前已经与第三人民医院、宝安区人民医院合作进行了500人次以上的测试,有效性达到100%。
目前,研究团队正努力推进机器人的应用与产业化。该机器人将有望应用于新型冠状肺炎病毒核酸检测的临床咽拭子样本采集工作,为战胜疫情贡献南科力量。

New publication
Recently, electrostatic adhesive technology has emerged in the field of exoskeleton robots, micro-robot, wall-climbing robots, and so on. However, there are still some problems in electrostatic adhesive technology that limits its application prospect, such as the difficulty in controlling the force and high actuation voltage. Associate Professor Hongqiang Wang's research group from the Department of Mechanical and Energy Engineering at the Southern University of Science and Technology (SUSTech) has recently published a paper about VR haptic gloves based on electrostatic adhesive force. Their research, entitled “So-EAGlove: VR Haptic Glove Rendering Softness Sensation with Force-tunable Electrostatic Adhesive Brakes,” was published in IEEE Transactions on Robotics (T-RO), through building a feedforward control model applied in So-EAGlove to quickly generate an accurate force to follow the force-displacement profile of the corresponding real objects.

SUSTech takes home first prize in IEEE International Conference on Soft Robotics 2022
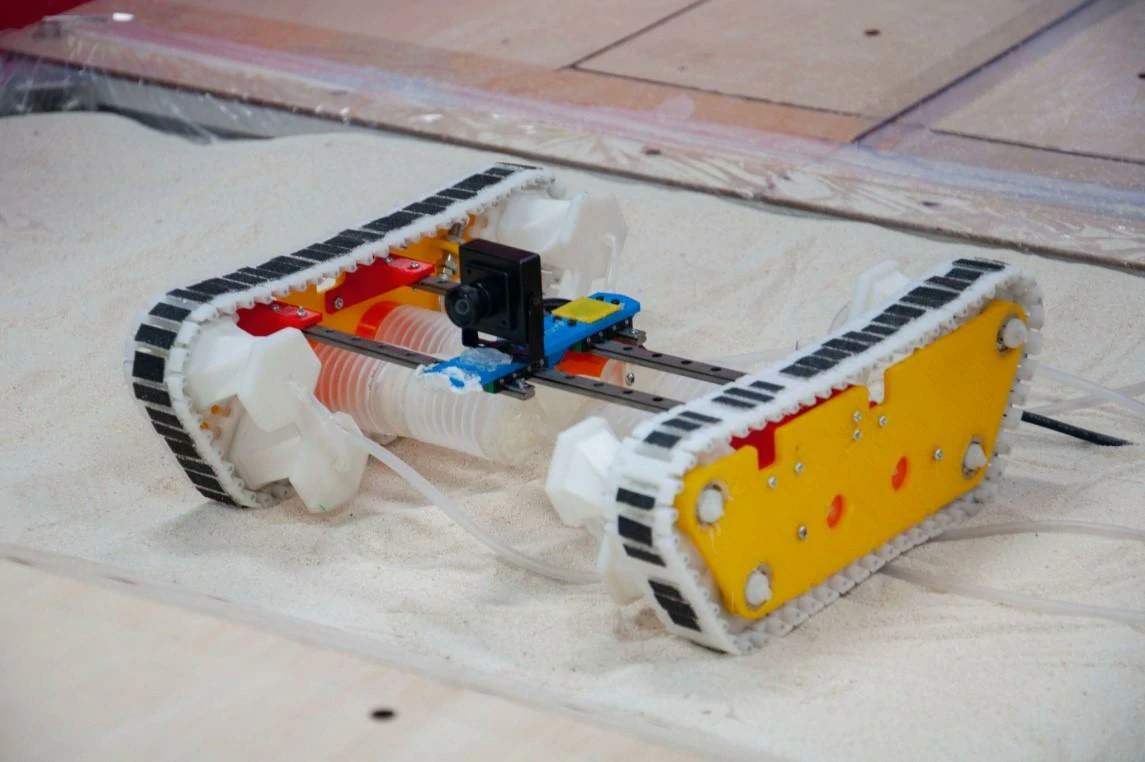
The winning SUSTech team was made up of undergraduates from the Department of Mechanical and Energy Engineering (MEE). Their members included Songhao HUANG, Anlun HUANG, Yixuan XIA, Boyu YANG, and Xipeng ZHANG, and were guided by Hongqiang WANG, Associate Professor of the Department of MEE. The competition attracted teams from many renowned universities worldwide, including the United Kingdom, the United States of America, and Singapore. The competition consists of two main categories: manipulation and locomotion. The teams had to demonstrate their robots' adaptability, automatic control, and system integration, allowing them to be competitive during the competition under different terrains. The soft robot from the SUSTech team was made up of a combination of a software rotary drive and a crawler traveling mechanism. Driven by air pumps, the robot can achieve high-efficiency movement, lateral deformation and contraction, navigate on various terrains such as slopes, sand, and roads, and move forward independently between random doorposts. RoboSoft is a top conference in soft robotics that brings together experts and scholars in this area from all over the world every year. It aims to showcase the latest developments in this field, provide a platform for researchers and scientists to exchange new research, new technologies, and new applications, and promote the development of the world's soft robotics field.
2021
New publication
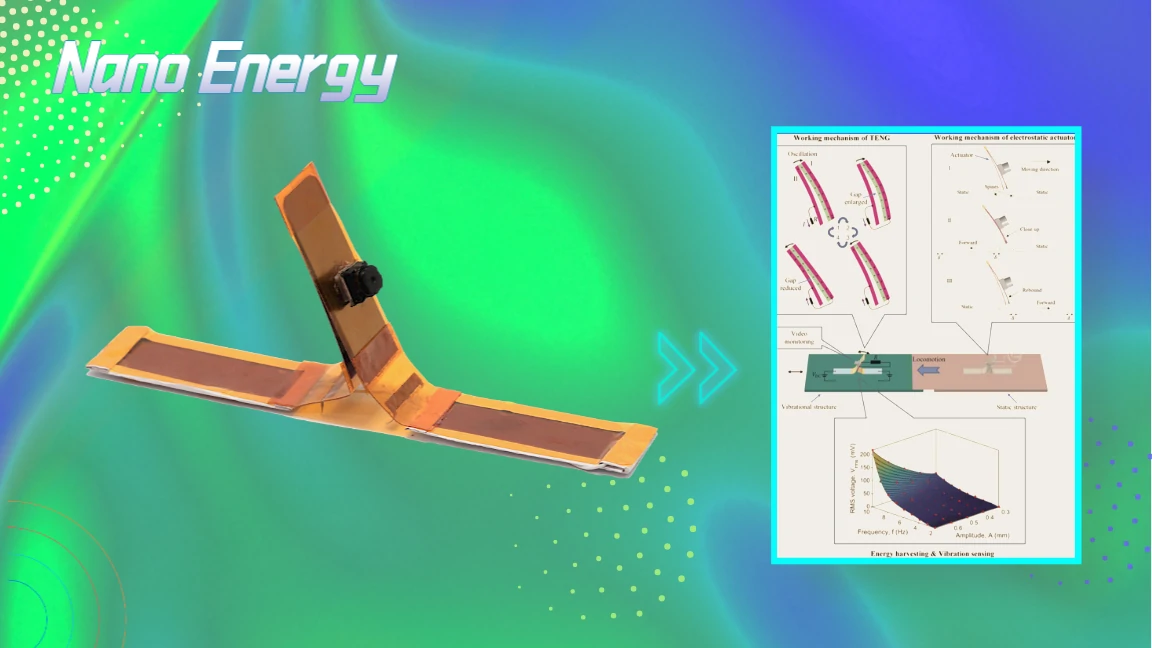
Recently, the research team of Associate Professor Wang Hongqiang from the Department of Mechanical and Energy Engineering of Southern University of Science and Technology and the research team of Assistant Professor Zi Yunlong from the Chinese University of Hong Kong have published their latest research results in Nano Energy, one of the leading journals in the field of intelligent structures and energy. The paper presents a novel robotic drive technology that combines electrostatic actuation and friction nanogenerators to achieve a low-cost, lightweight, compact robotic structure that integrates movable energy harvesting and movable vibration sensing.
New publication
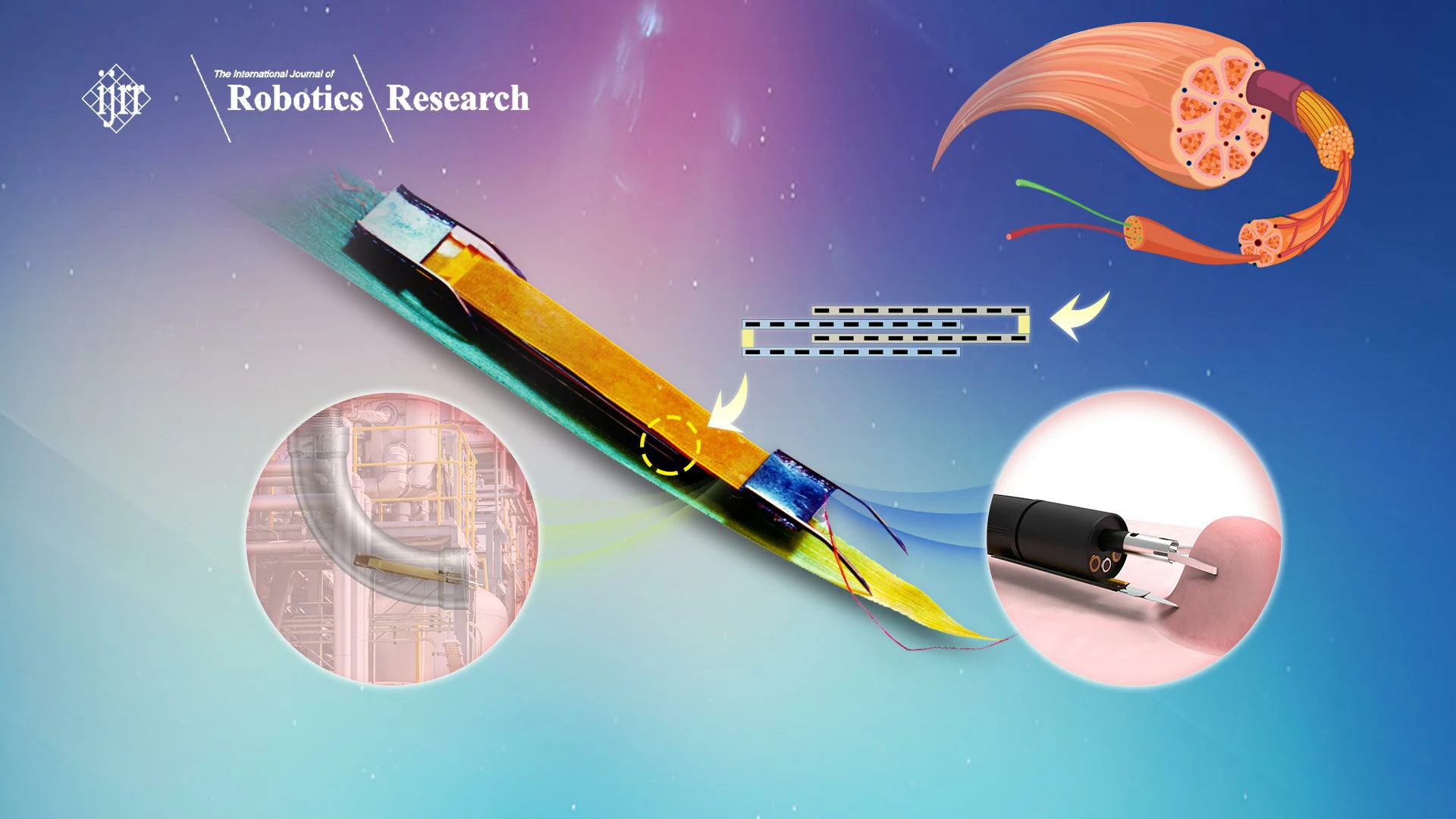
Recently, Associate Professor Hongqiang Wang's group (Dept. MEE, SUSTech) proposed a novel design paradigm for artificial muscle, implementing highly compliant, controllable, and scalable mesoscale actuators and robots. This work was published in the International Journal of Robotics Research (a top journal in the robotics field) as "Biologically inspired electrostatic artificial muscles for insect-sized robots". The Academic Times and News SUSTech also reported this work.
SUSTecher wins First Prize in IEEE International Conference on Soft Robotics
Recently, the Institute of Electrical and Electronics Engineers (IEEE) held its 2021 International Conference on Soft Robotics (RoboSoft) online, hosted by Yale University. The Southern University of Science and Technology (SUSTech) participated in the competition and their team won the first prize in the locomotion competition category. The participating team of SUSTech was spearheaded by Hongqiang WANG, Associate Professor of the Department of Mechanical and Energy Engineering (MEE). The members of the team included Yuxuan LIAO, Hanwen ZHANG, Shuyuan WANG, Yiming ZHANG, Shangkun GUO, and Songhao HUANG, all of whom are undergraduates of MEE. The technical consultants of the team contained Renjie ZHU, Ting WANG, and Diancheng LI.

Prof. Shaobo Tu (Nanchang University) gives a lecture about the Growth of Ferroelectric KNbO3 Crystals from MXenes
On the morning of April 16, 2021, invited by Professor Hongqiang Wang, an academic lecture about the Growth of Ferroelectric KNbO3 Crystals from MXenes was given by Professor Shaobo Tu (School of Material Science and Technology, Nanchang University) at the MEE Dept., SUSTech.

2020
Farewell to Dr. Yiqiang Fu and Student Tingting Hou
Dr. Yiqiang Fu and Student Tingting Hou have successfully finished their period of research as visiting researchers in AARLab and plan to back to CUHK. Today, the entire group holds a warm farewell and wishes all the best to them.

Graduation Messages and Wishes for 2020
Today, Mr. Jianjun Mao and Mr. Yifan Zhang successfully graduated from SUSTech & HIT and received their Master's degree in Engineering. Both of them will work in Dongguan City after graduation. Let's wish all the best to them.

SUSTech engineers develop smart swab collection robot
Recently, Assistant Professor Hongqiang WANG (Mechanical and Energy Engineering - MEE) has developed a smart robot that can collect throat swabs while preventing cross-infection between doctors and patients, and protecting the medical staff. The novel coronavirus (COVID-19) has created considerable pressure on testing methodologies. Currently, the most widely used method for diagnosing new cases of COVID-19 is the use of nucleic acid detection tests. As part of this, nasal and throat swabs are an essential step in nucleic acid detection. However, medical staff is at risk of infection through improper handling. Under the guidance of MEE head Yiming RONG, the research group has developed a robot that can collect throat swabs. The entire system is designed for the comfort of the patient while ensuring the professional operation by medical staff. Doctors and nurses can place the throat swabs in the right place from a remote location.

2019
Towards the Human-Machine Interaction and Robot Perception – Wearable Electronics Sensors and System, by Senior Research Scientist Hao Wu (HUST)
Invited by Professor Hongqiang Wang, a popular seminar, given by Senior Research Scientist Hao Wu (School of Mechanical Science and Engineering, HUST), was held at the MEE Dept., SUSTech. Endowing robotics the ability to comprehend human behaviors and intentions throung bioelectric signal collection and decoding is a vital technology in the human-machine interaction field. Meanwhile, intelligent robots with massive integrated sensors are highly desired to realize intelligent sensing, building a solid foundation of dexterous manipulation. Based on flexible electronics technology, the research team designed and fabricated a flexible epithelial electrode by using flexible materials with excellent electrical properties, such as conductive polymers and graphene. The electrode is conformal to human skins and capable of collecting the EMG signal. In this work, a wearable human-machine interactive system was developed by integrating the flexible epithelial electrode with a flexible multi-channel signal acquisition circuitry. This system is extensively applicable for dexterous manipulation, prosthesis control, and Rehabilitation and service robot.

Leaders of Guangdong Province visited our laboratory
Leaders and experts of Guangdong Province visited our laboratory. The pictures below are Prof. Wang introducing our scientific contribution to the visiting group.
Group Game: Paintballing
The group members and Prof. Wang play paintball at the Training Base of SUSTech.

The group from Business Breakthrough University (BBT), Japan, visits the Advanced Actuators & Robotics Lab in SUSTech
The BBT group visits the AARL in SUSTech.
