Modeling and Optimization of Electrostatic Film Actuators Based on the Method of Moments
-
Electrostatic film actuators represent a promising new approach to drive a soft robot, but they lack a comprehensive model to
link the design parameters and actuation performance, making actuator design and parameter optimization challenging. To solve
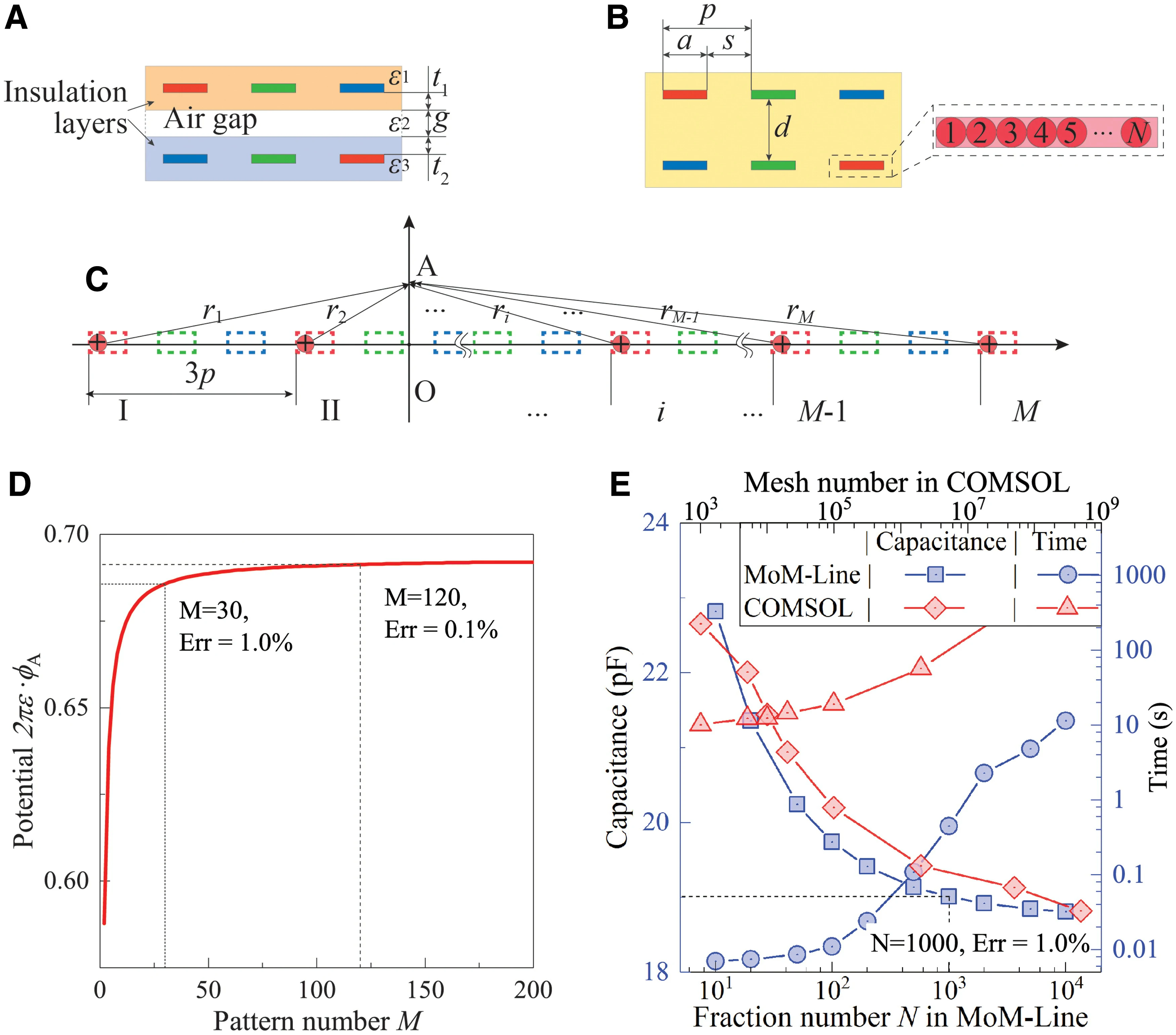
this problem, we build a mathematical model based on the method of moments by assuming that each electrode consists of a large
number of line charges. This model can directly deduce fluctuation in thrust and adhesive forces during actuator movement, as
well as the distribution of electric potential and field strength, for analysis and optimization. It consumes shorter computing
time and fewer computing resources, but with comparable accuracy, in comparison with previous indirect means. It is validated by
results from both previous studies and on-site experiments. Based on this model, we generate numerous values of actuator output
force for different structural parameters. By analyzing the tendency, we summarize a parameter optimization workflow and write
an open-sourced program as an example to facilitate the parameter selection for actuator design starting from scratch.

Analyses and Optimization of Electrostatic Film Actuators Considering Electrical Breakdown
-
Electrostatic film actuators are an emerging flexible actuation technique based on the electrostatic field. It is typically
composed of two films (the stator and the slider), each of which integrates multiple phase interdigital electrodes. Since the
structure and the electrical field distribution are complex, previous researches lack parameter analysis and optimization.
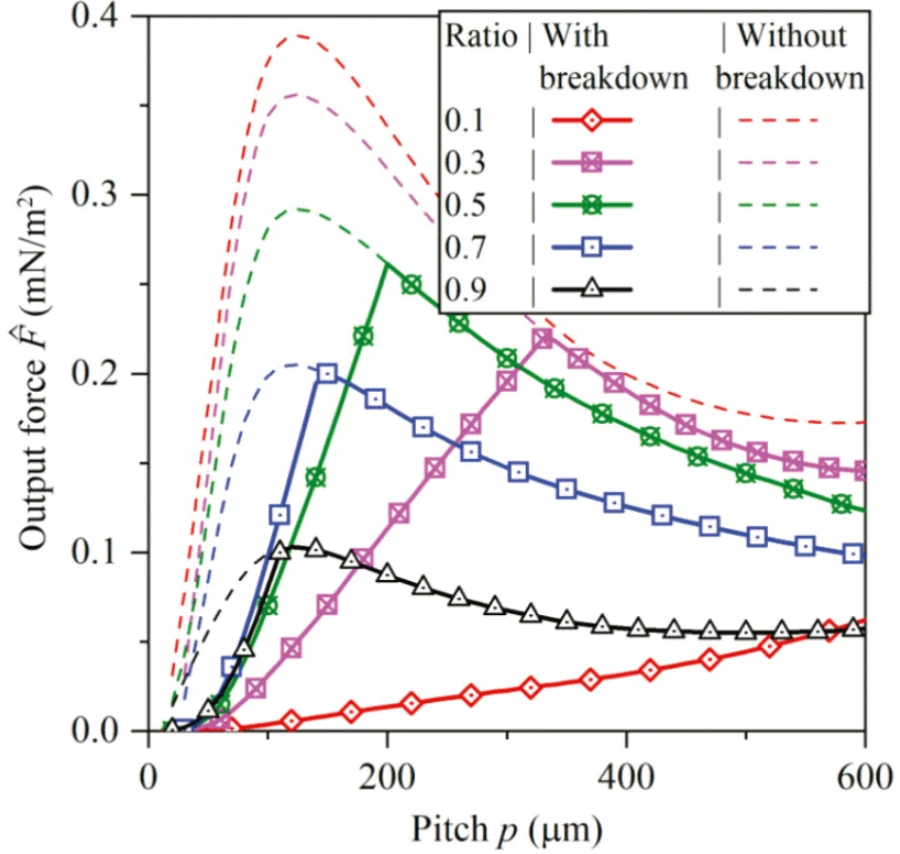
Although recent study models and compares the output forces at the same voltage, the actuators of different parameters could
survive at different critical voltages. With the concern on the electrical breakdown, this work is a preliminary attempt to
analyze the maximum force and critical voltages for different specifications using the method of moments with line-charges.
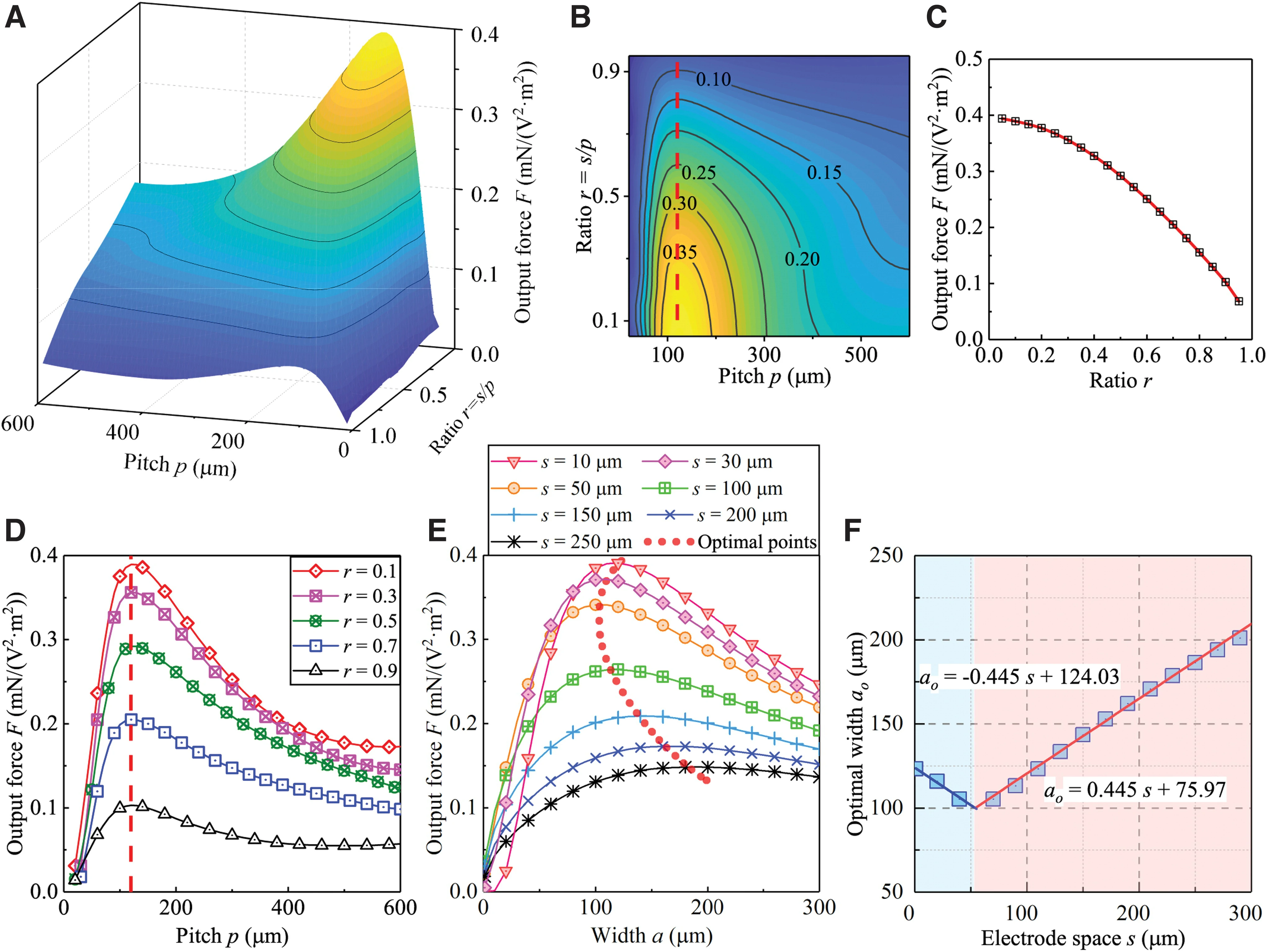
The computation results give qualitative clues about the optimization of various parameters. To achieve a higher maximum force,
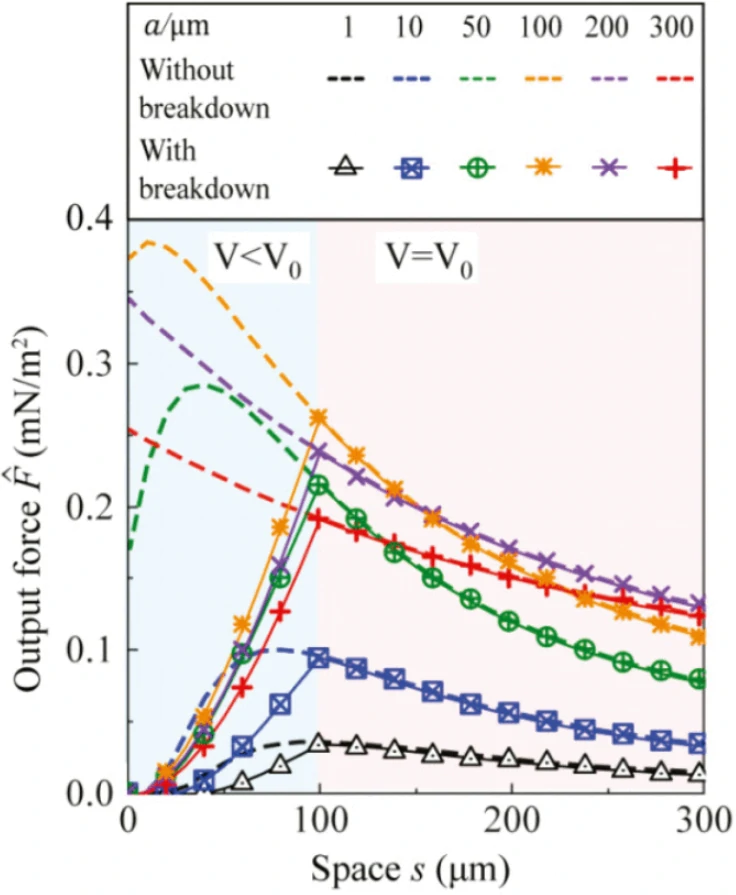
balancing the breakdown in the vertical gap and the horizontal gap is one of the primary concerns in the design. The theoretical
maximum force for electrostatic film actuators can be achieved by different parameter sets: a large insulation layer and electrode
space (high critical voltage) or a thin insulation layer and electrode space (low critical voltage). Based on this knowledge,
we designed and fabricated an electrostatic film actuator with a force density of 126.5 N/m 2 , 35% larger than the previous
actuators at the same condition.



Reference
Wenguang Wang, Dongliang Fan, Renjie Zhu, Peisong Wang, Yonghua Zhao, and Hongqiang Wang* . Modeling and Optimization of Electrostatic Film Actuators Based on the Method of Moments. Soft Robotics , 2020, 8(6), pp. 651-661.
Yang Qu, Peisong Wang, Wenguang Wang, and Hongqiang Wang* . Analyses and Optimization of Electrostatic Film Actuators Considering Electrical Breakdown. IEEE Robotics and Automation Letters , 2021, 6(2), pp. 1152-1159.