So-EAGlove: VR Haptic Glove Rendering SoftnessSensation With Force-Tunable Electrostatic Adhesive Brakes
-
Haptic gloves allow the players to feel the virtual world more realistically by providing force feedback. At present, haptic gloves
are mainly driven by conventional motors, and for them, being lightweight, low cost, low in power consumption, and intrinsically safe
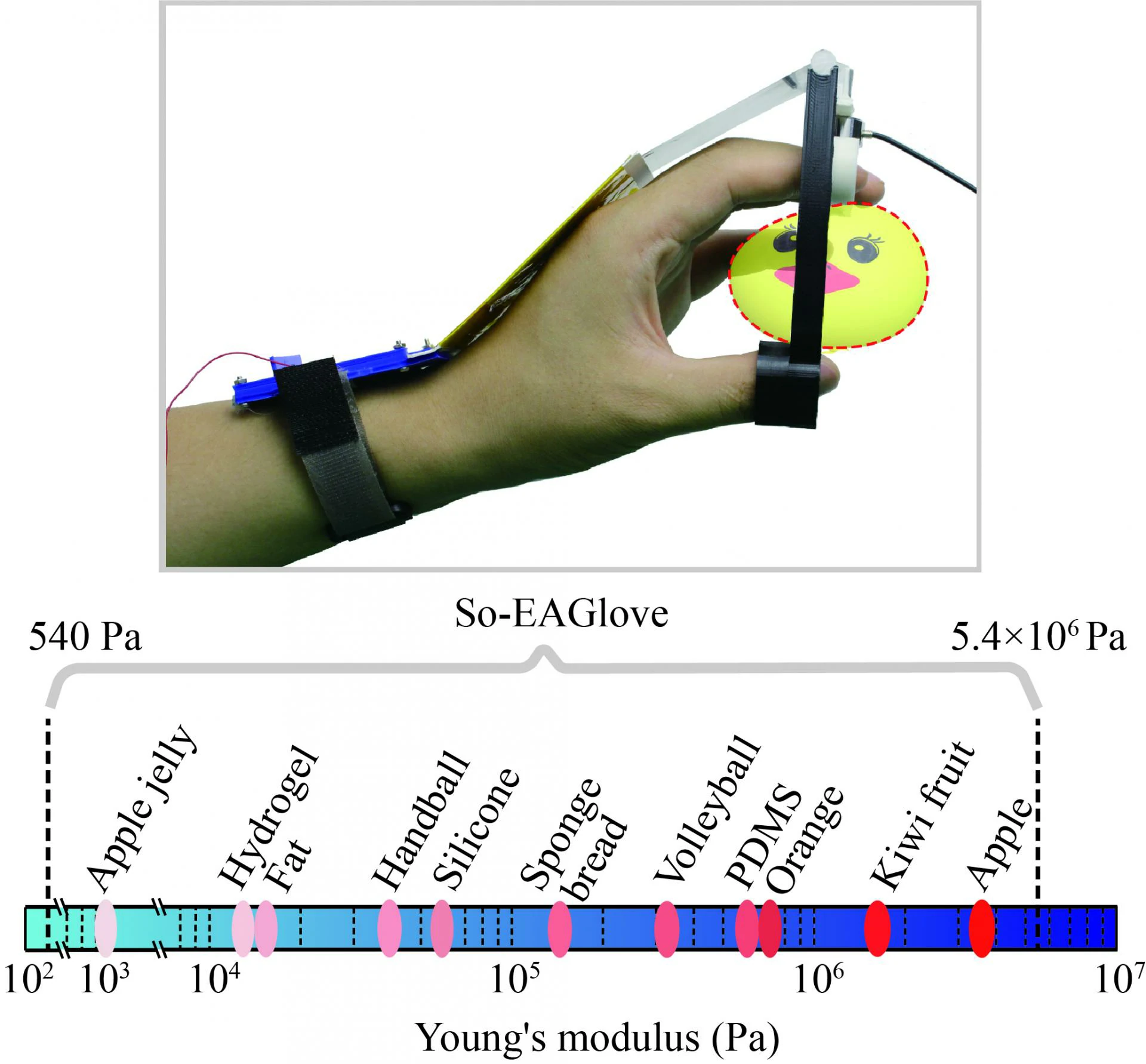
to operators are challenging. Here, we designed a haptic glove (So-EAGlove) integrating a flexible electrostatic adhesive brake to resist
human fingers with a tunable braking force and render a softness sensation. This glove weighs only 51 g, but is capable of simulating objects
in a large range of Young's modulus from 540 Pa to 5.4 MPa. The electrostatic adhesive brake costs only approximately 2.43 mW during operation,
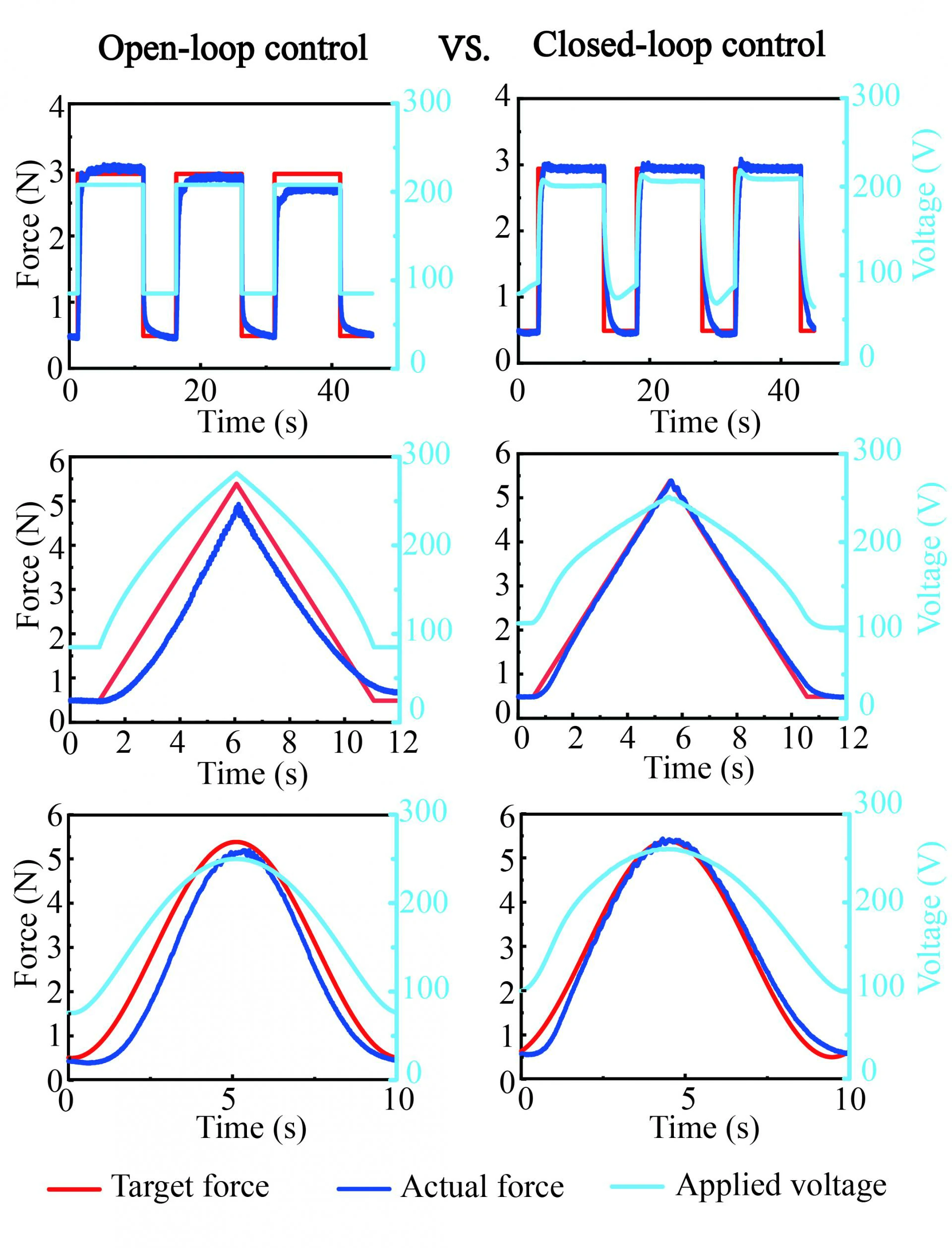
i.e., more than three days powered by a small button battery. We built a feedforward control model and evaluated its performance. Experimental
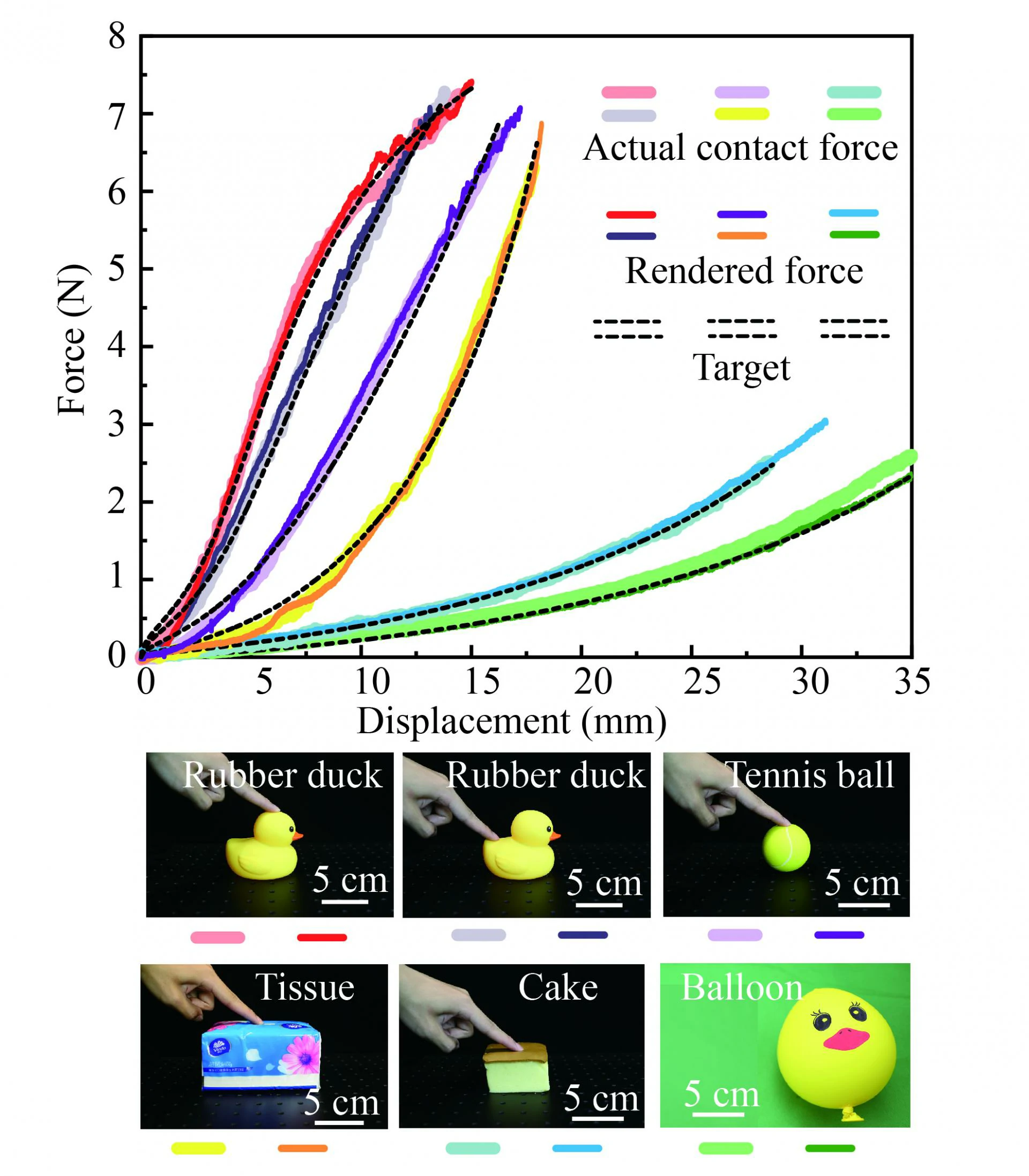
results show that this glove can generate an accurate force to follow the force-displacement profile of the corresponding real objects. The
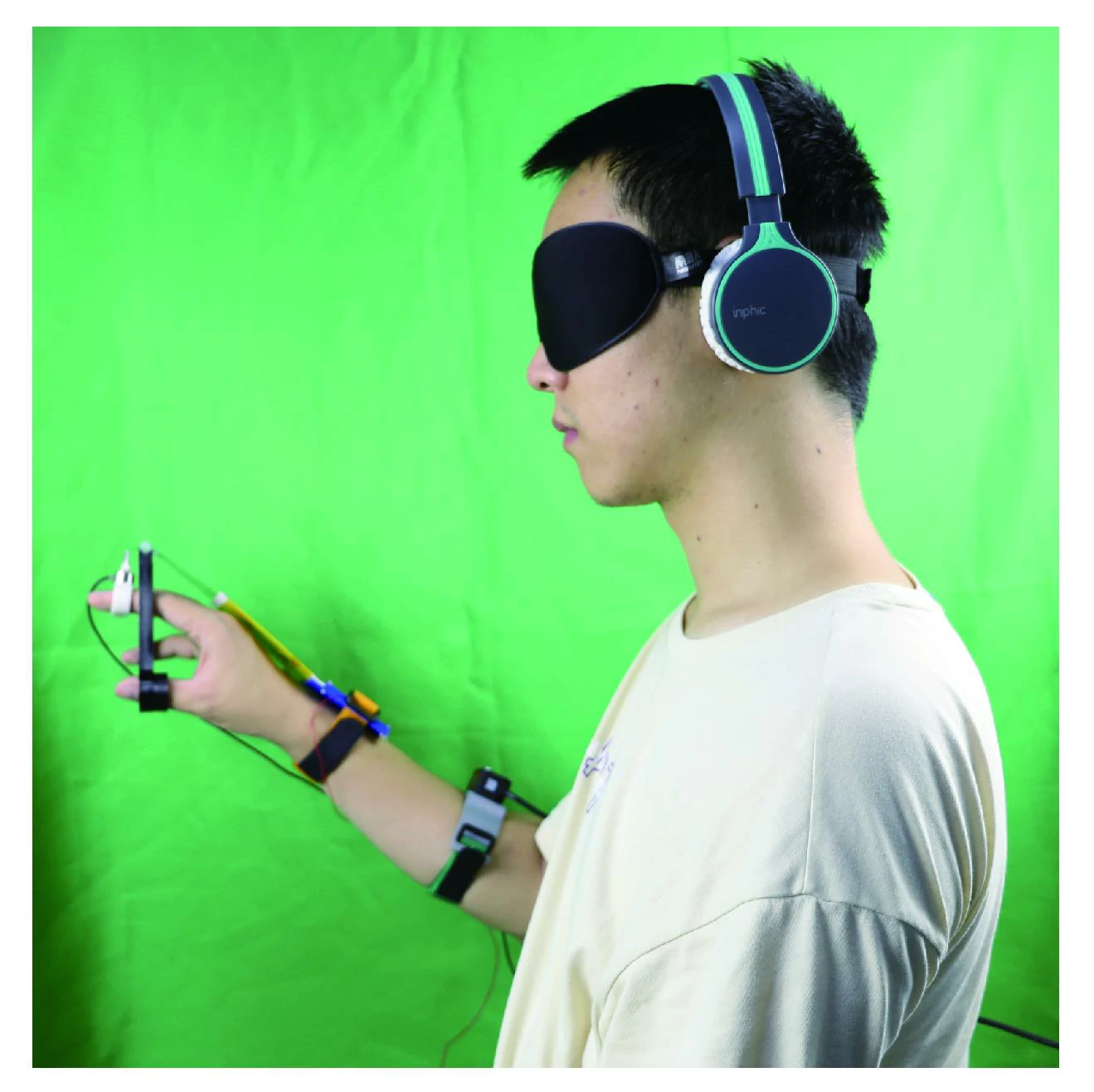
error is less than 7%, barely noticeable by the subjects. The subjective tests also demonstrate that little statistical difference exists
between the real objects and the virtual objects for the subjects.
Videos
Reference
Quan Xiong, Xuanquan Liang, Daiyue Wei, Huacen Wang, Renjie Zhu, Ting Wang, Jianjun Mao, and Hongqiang Wang*. So-EAGlove: VR Haptic Glove Rendering Softness Sensation with Force-tunable Electrostatic Adhesive Brakes. IEEE Transaction on Robotics , 2022, 38(6), pp. 3450-3462.
© Copyright Wanglab. All Rights Reserved
Designed by Bootstrap