Augment Laminar Jamming Variable Stiffness Through Electroadhesion and Vacuum Actuation
-
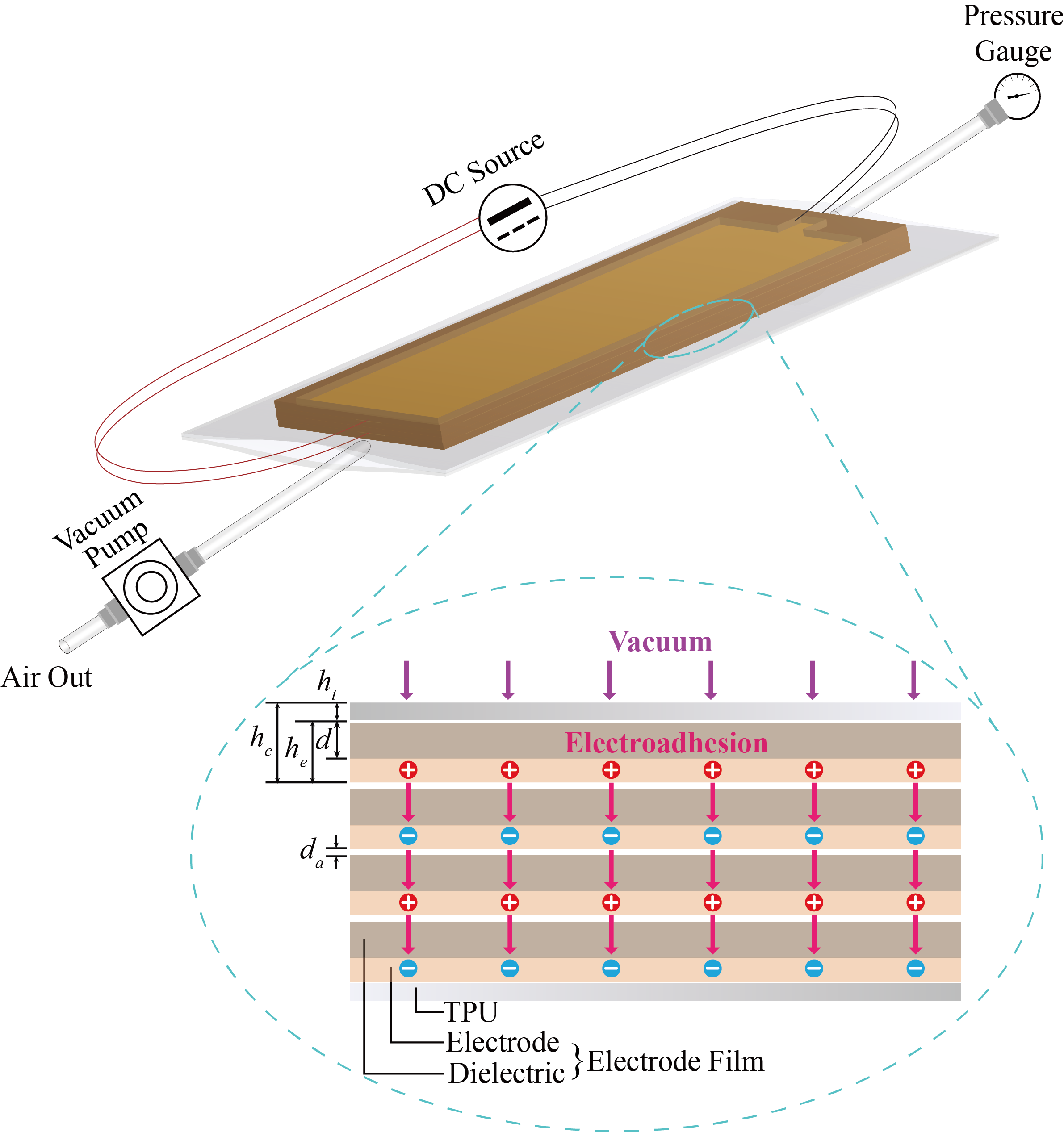
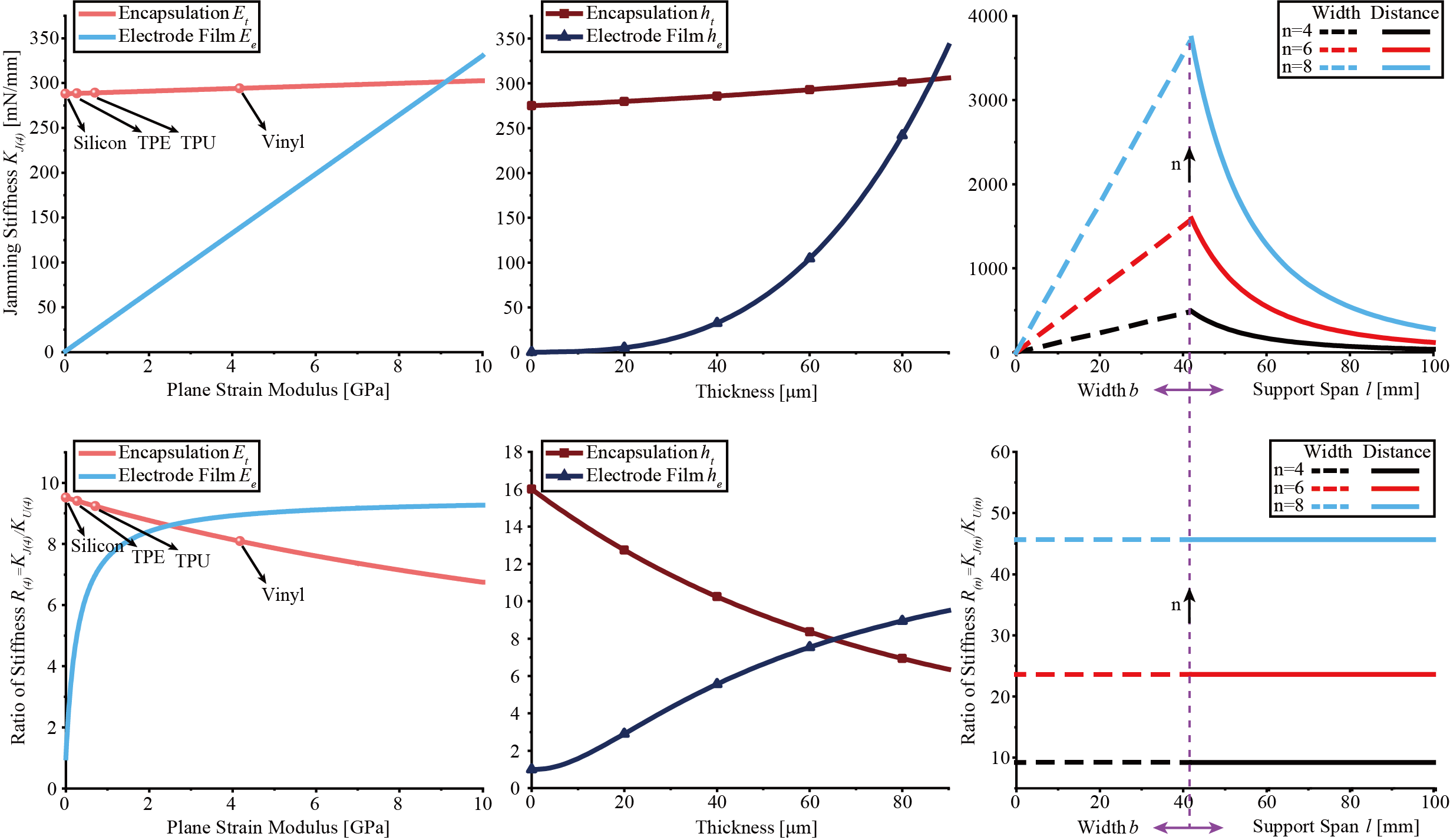
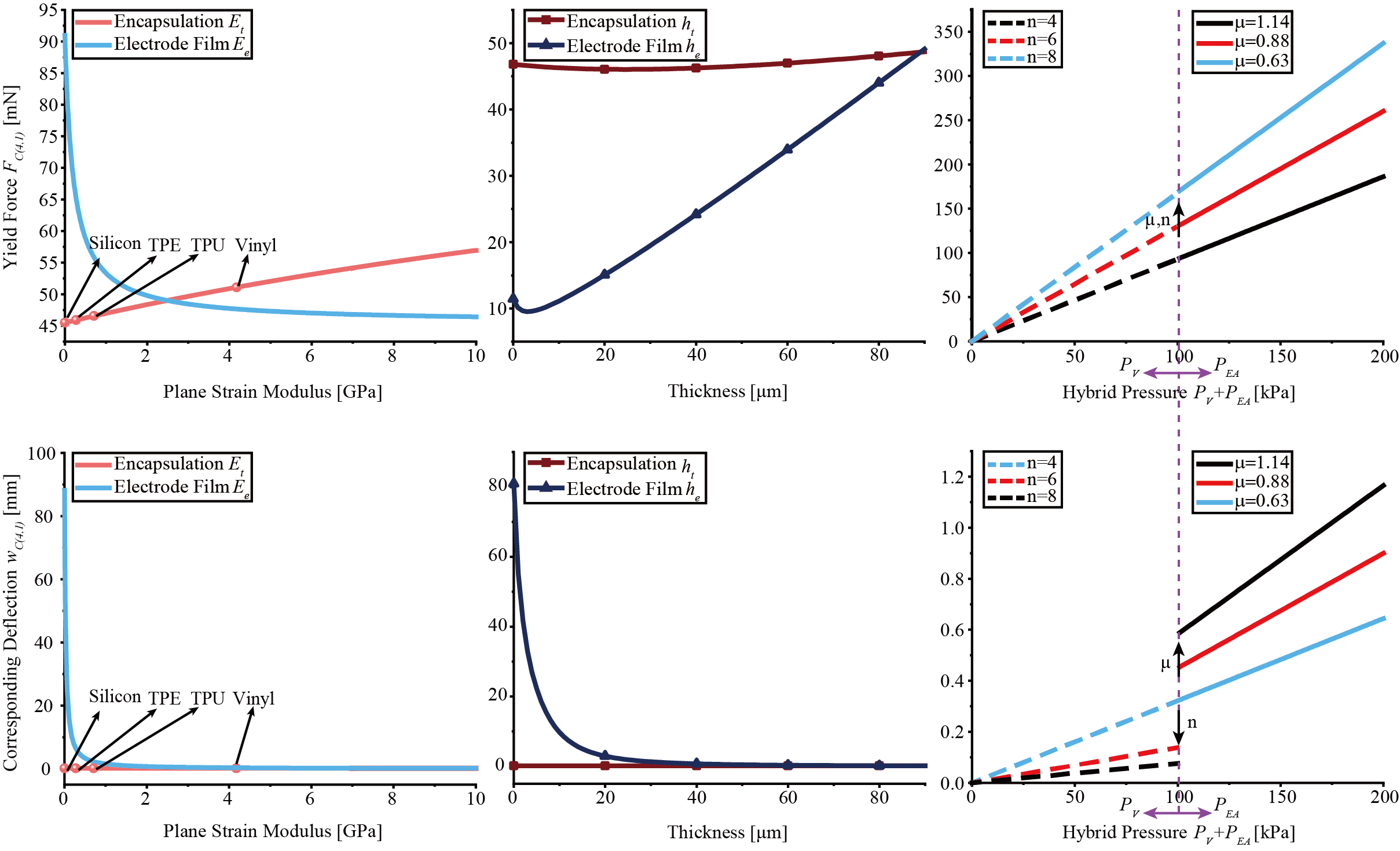
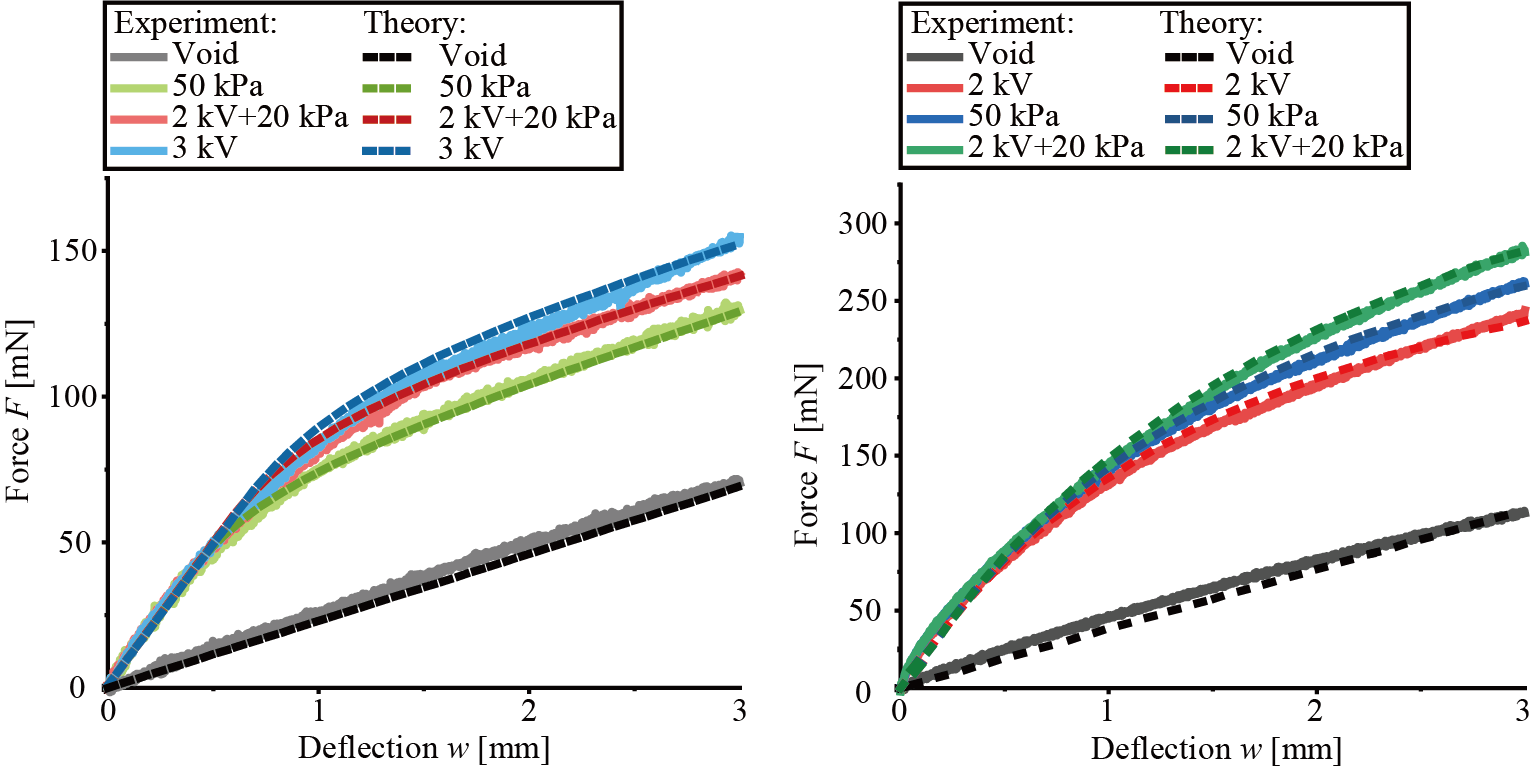
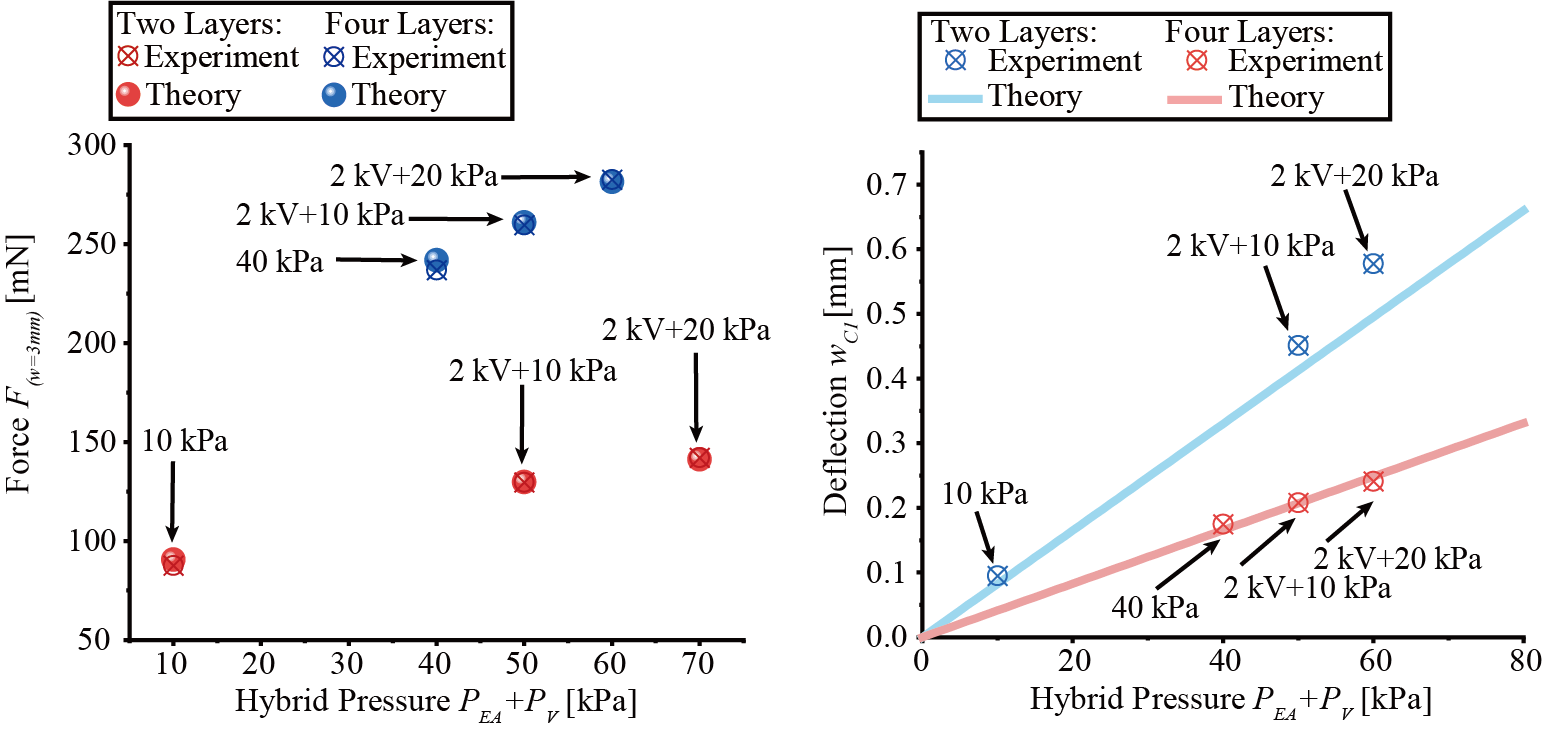
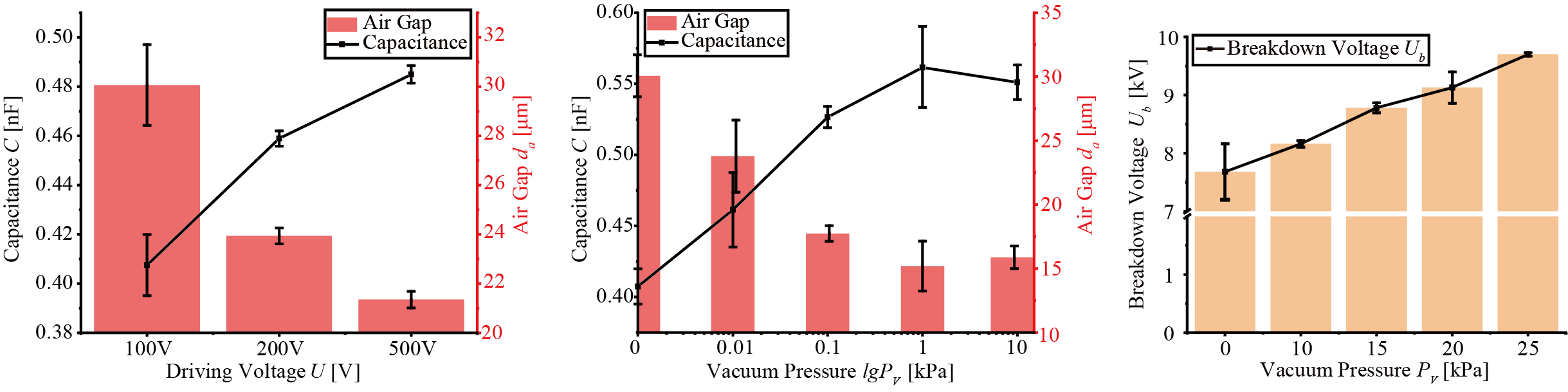
Various variable stiffness mechanisms have been developed to bestow new capabilities for the robotics community by changing the mechanical behaviors of robots. However, variable stiffness is limited in actuation, response speed, stiffness ratio, and, most importantly, modeling. This article proposes hybrid actuated laminar jamming to outperform individual actuated variable stiffness mechanisms. An analytical model for multilayer laminar jamming that accurately characterizes mechanical behaviors in experiments is first built. Comprehensive parametrical analysis based on this model serves as design guidelines for performance improvements of laminar jamming. Feedforward control further proves the validity of the proposed model and exhibits good controllability, showing response speed as fast as 5 ms. The synergy between electroadhesion and vacuum actuation significantly enhances overall performance, resulting in far greater effects than individual contributions. For instance, the proposed device generates a high stiffness that is almost impossible for individual vacuum or electroadhesion. Moreover, vacuuming increases 23% of the breakdown voltage, which leads to a larger electroadhesion force and, hence, a higher stiffness.
Reference
Chen, C., Ren, H. and
Hongqiang Wang*.
Augment Laminar Jamming Variable Stiffness Through Electroadhesion and Vacuum Actuation.
In IEEE Transactions on Robotics (T-Ro), (41), 819-836.