SimoBot: An Underactuated Miniature Robot Driven by a Single Motor
-
A simple-structured, low-cost miniature robot is highly desired for swarm robotics research. In this article,
we designed an underactuated miniature robot using only one motor, named as SimoBot, to save space, cost, weight,
and energy consumption. Since it has only one motor but needs to travel on the 2-D ground, the design, moving
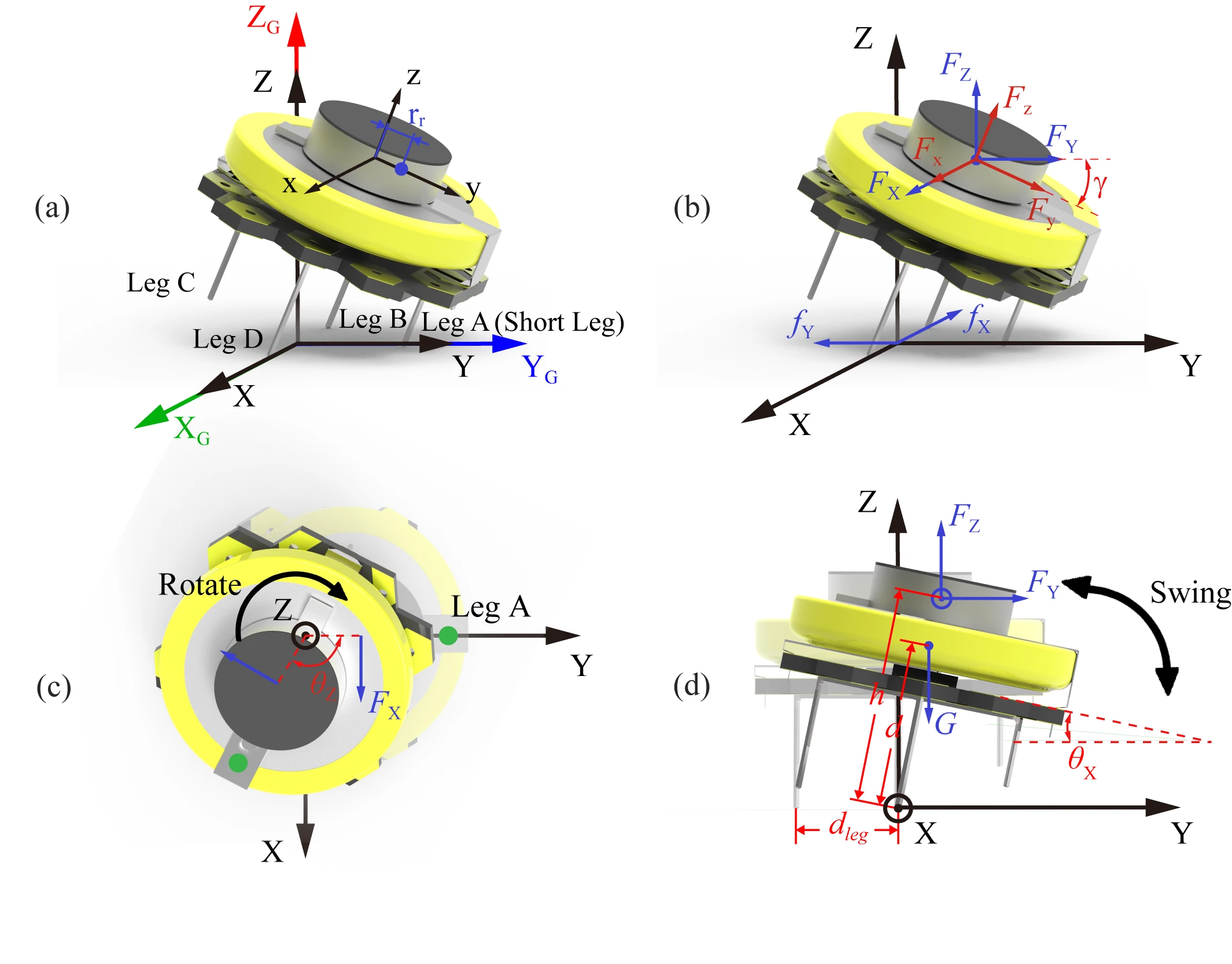
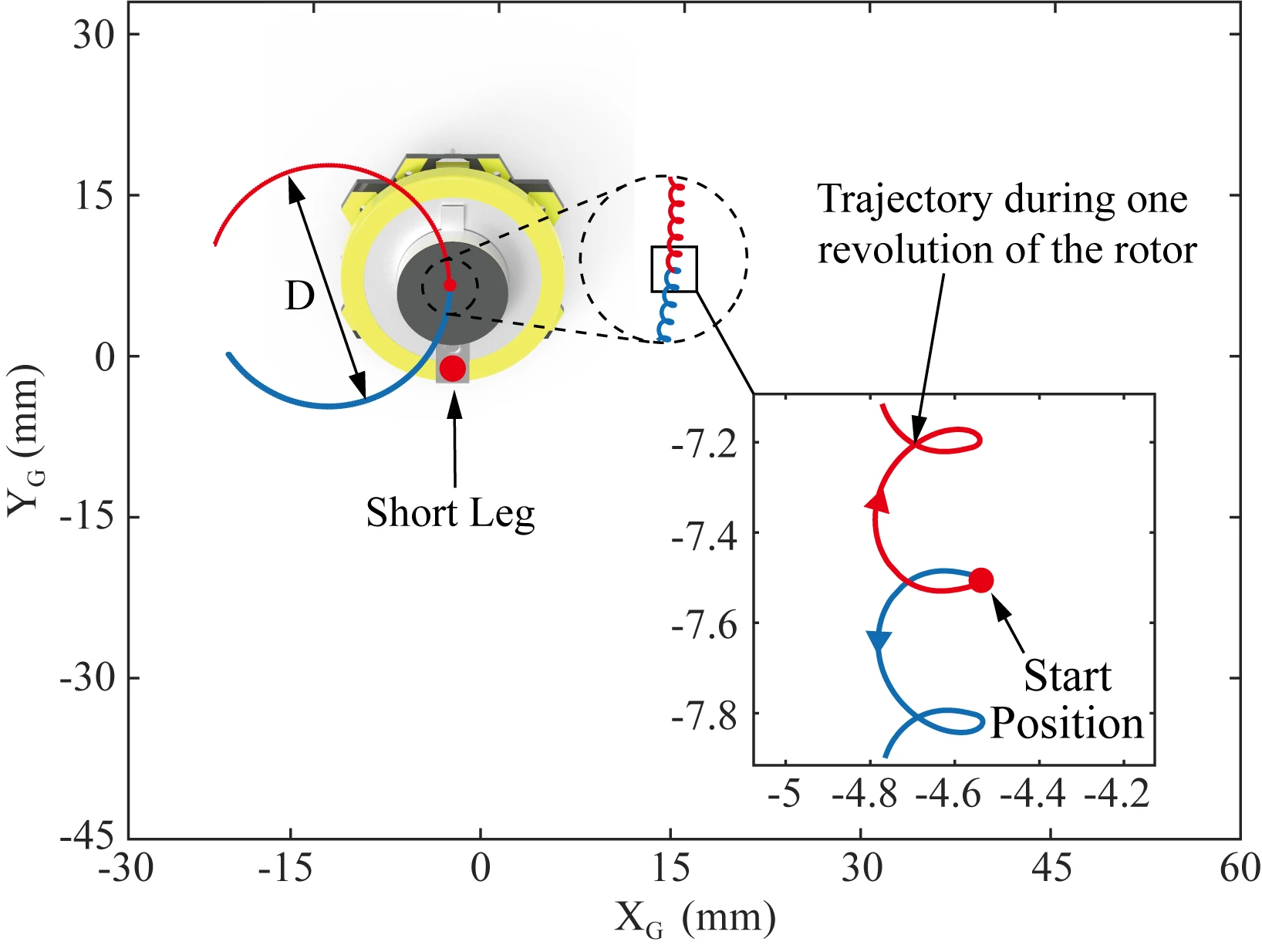
mechanism, and control are all challenging. We conceived a movement strategy based on the interplaying between
the centrifugal force and swinging motion of the robot to generate translation and rotation on the ground and finally
follow various arbitrary paths. This robot has only five simple components—a vibration motor, a button cell, a
microcontroller board, four-pin legs (one of which is shorter than the others), and sensors. This article built the kinematics
and kinetics models and analyzed and optimized the parameters. The prototype weighs only 4.76 g, costs 4.7 dollars,
and is 20 mm in diameter and 18 mm in height. It can run as fast as 40 mm/s. Its cost of transportation is only 55,
smaller than most miniature robots with onboard power and insects. By modulating voltage polarities on the
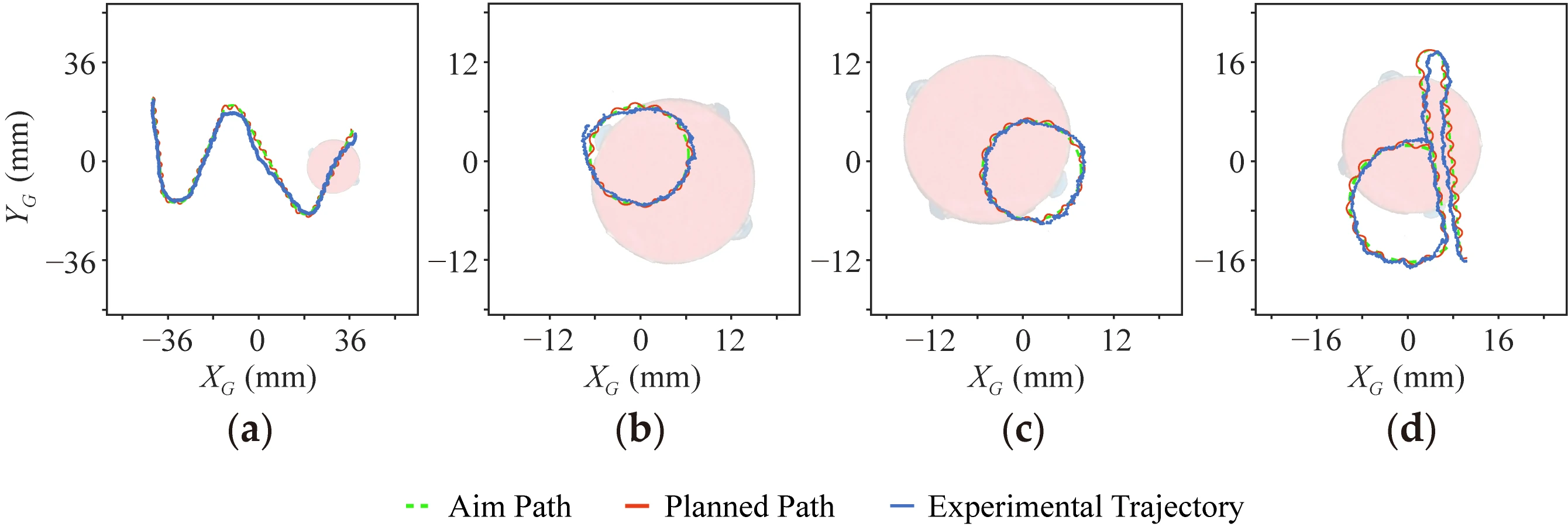
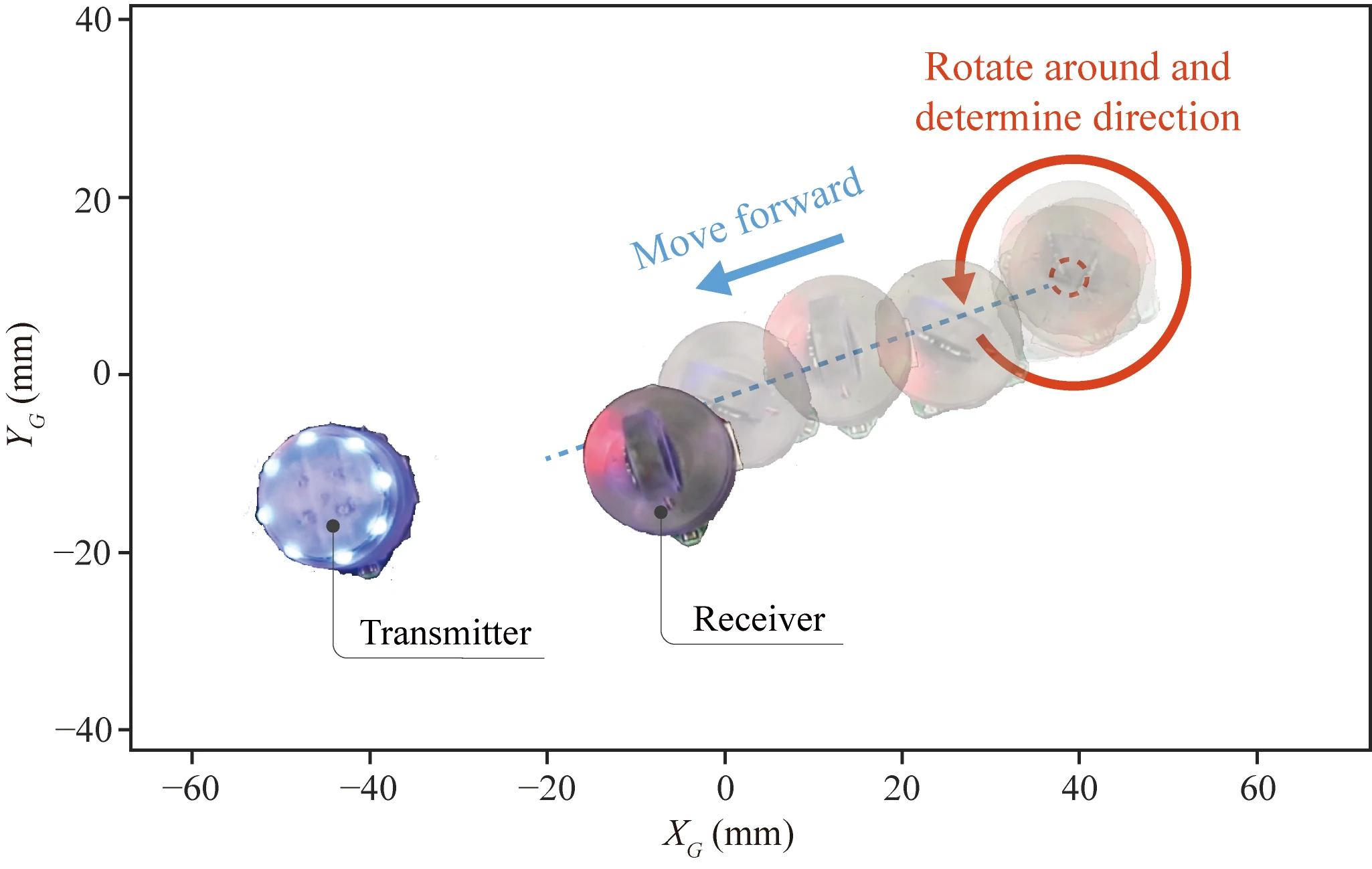
motor and the periods, we demonstrated the controllability of SimoBot by the movement along a straight line, a circle,
an “S” curve, and more arbitrary trajectories.


Miniature Mobile Robot Using Only One Tilted Vibration Motor
-
In miniature mobile robots, reducing the number of actuators can effectively reduce the
size and weight of the robot. However, it is challenging to design a robot with as few actuators
as possible without losing good motion performance. This work presented a simple-structured
low-cost miniature mobile robot. It is driven by only a single tilted motor and yet is fully capable
of being controlled to move forward and turn left or right on the ground. Based on the stick-slip
mechanism, the robot's motion is achieved by interplaying between the centrifugal force generated
by the vibration motor tilted on the robot and the friction force of the robot. The robot's speed can
be controlled by regulating the magnitude and the period of the applied voltage. Finally, the robot
can translate and rotate on the ground and follow various arbitrary paths. The prototype weighs
only 11.15 g, costs $6.35, and is 20 mm in diameter and 25 mm in height. The proposed system is
experimentally verified and demonstrates the controllability of the robot by the movement along a
straight line, a circle, and more arbitrary paths.

Videos
Reference
Yifan Zhang†, Renjie Zhu†, Jianhao Wu, and Hongqiang Wang*. SimoBot: An Underactuated Miniature Robot Driven by A Single Motor. IEEE/ASME Transaction on Mechatronics , 2022, 27(6), pp. 5748-5759.
Renjie Zhu, Yifan Zhang, and Hongqiang Wang*. Miniature Mobile Robot Using Only One Tilted Vibration Motor. Micromachines (Special Issue "Microrobotics: A Commemorative Issue in Honor of Professor Robert J. Wood") , 2022, 13(8), 1184.
© Copyright Wanglab. All Rights Reserved
Designed by Bootstrap