AARLab (Advanced Actuators and Robotics Lab) aims to conduct research on new, flexible electrostatic film actuator and soft robotics. Since actuators are the primary basis in machines, they fundamentally determine the functions of machines and potentially affect their applications, and therefore, promote symbolic social progress (e.g., steam engines for the Age of Steam and electric motors for the Age of Electricity). Nowadays, however, the weakness and inadequacy of vastly used electromagnetic motors are impeding the technology progress in at least three major fields: 1) for medical robots, actuators possessing satisfactory performances, e.g., compact size, high accuracy, and large stroke, remain to be developed; 2) bioinspired robots, particularly insect-inspired ones that limit by current actuators, are still not comparable to their natural counterparts regarding agility, robustness, and strength; 3) humanoid robots with conventional motors are not friendly enough to human collaborators, and soft, powerful, efficient, and accurately controlled actuators are highly desired.
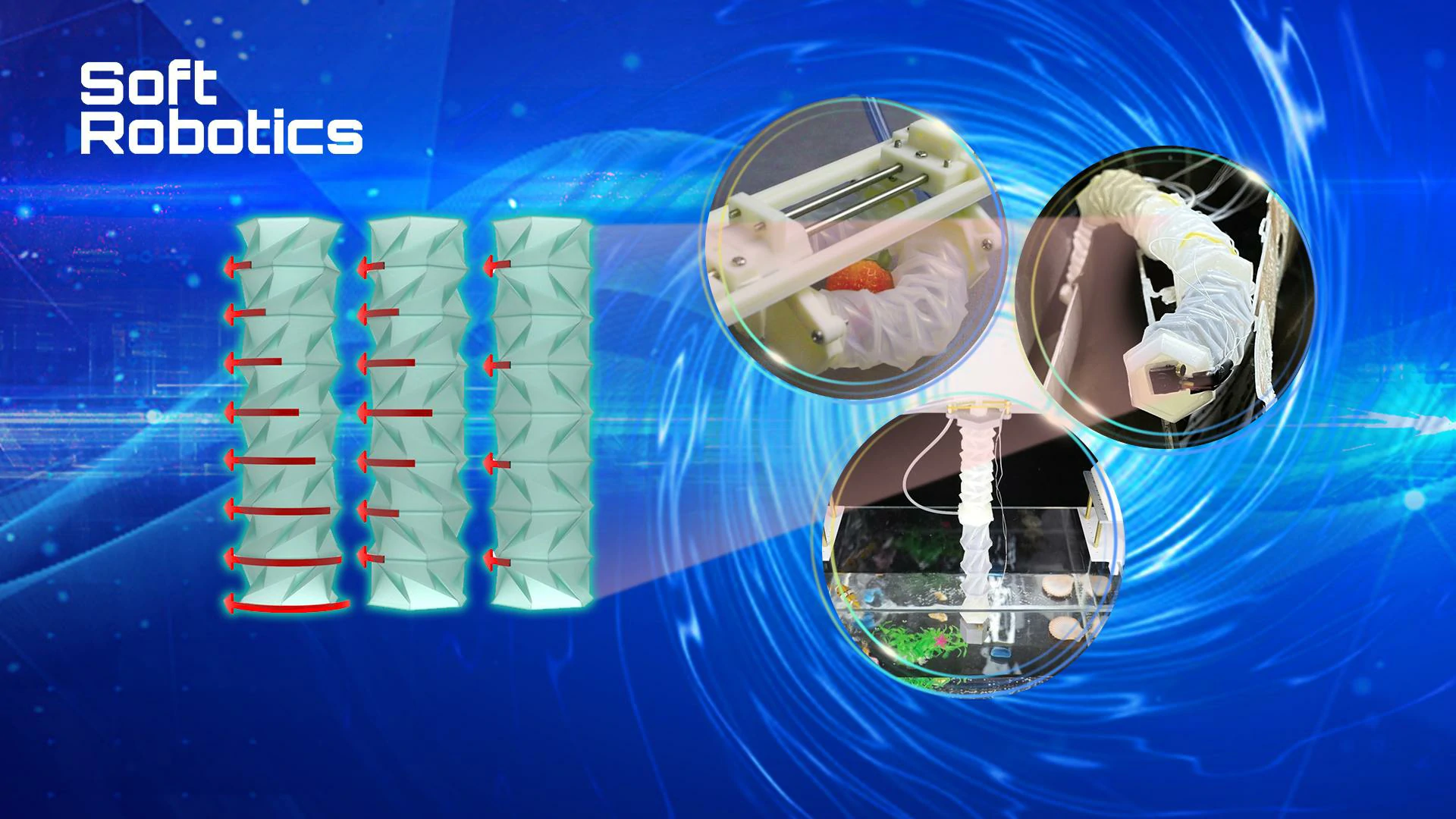
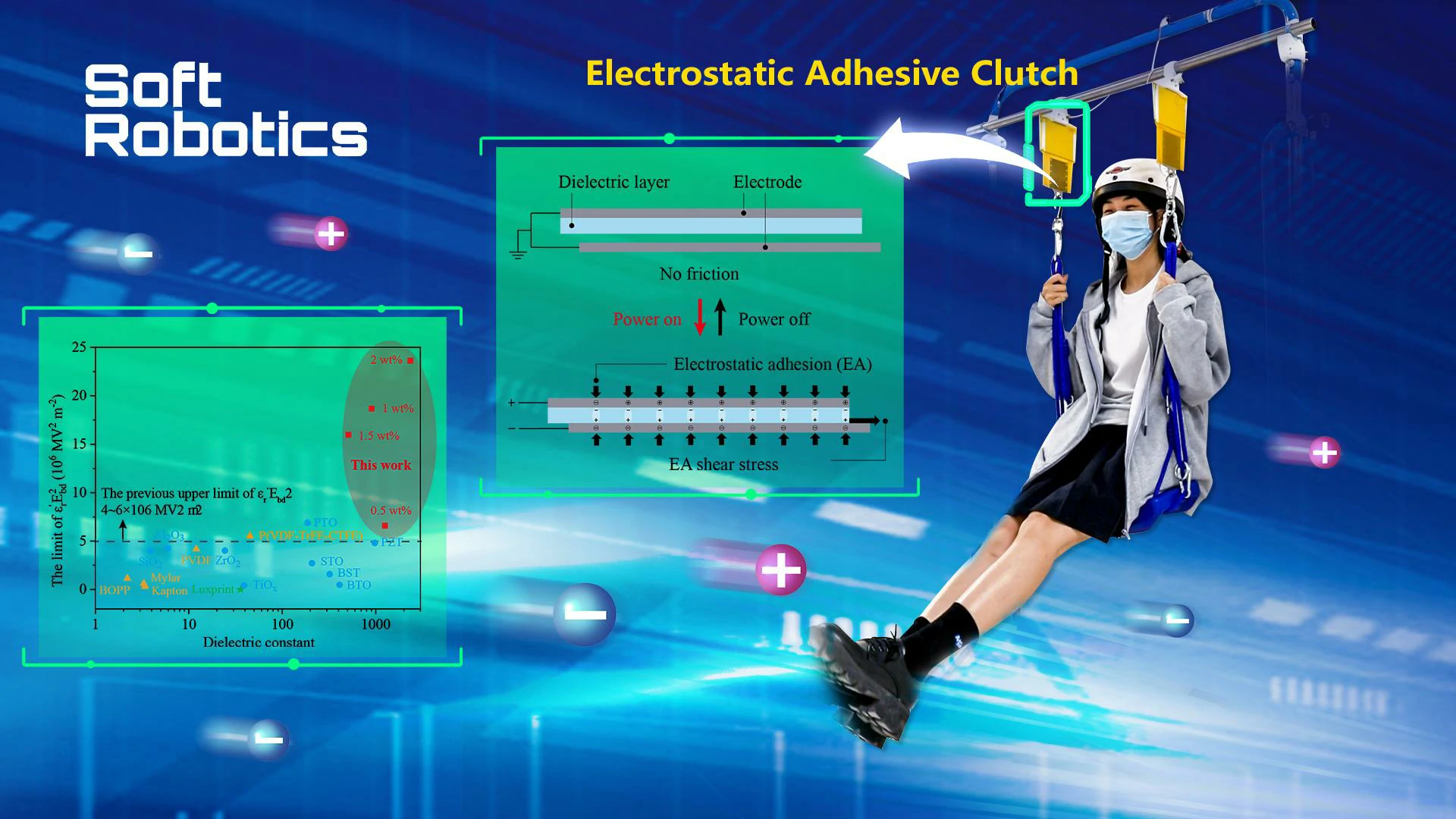
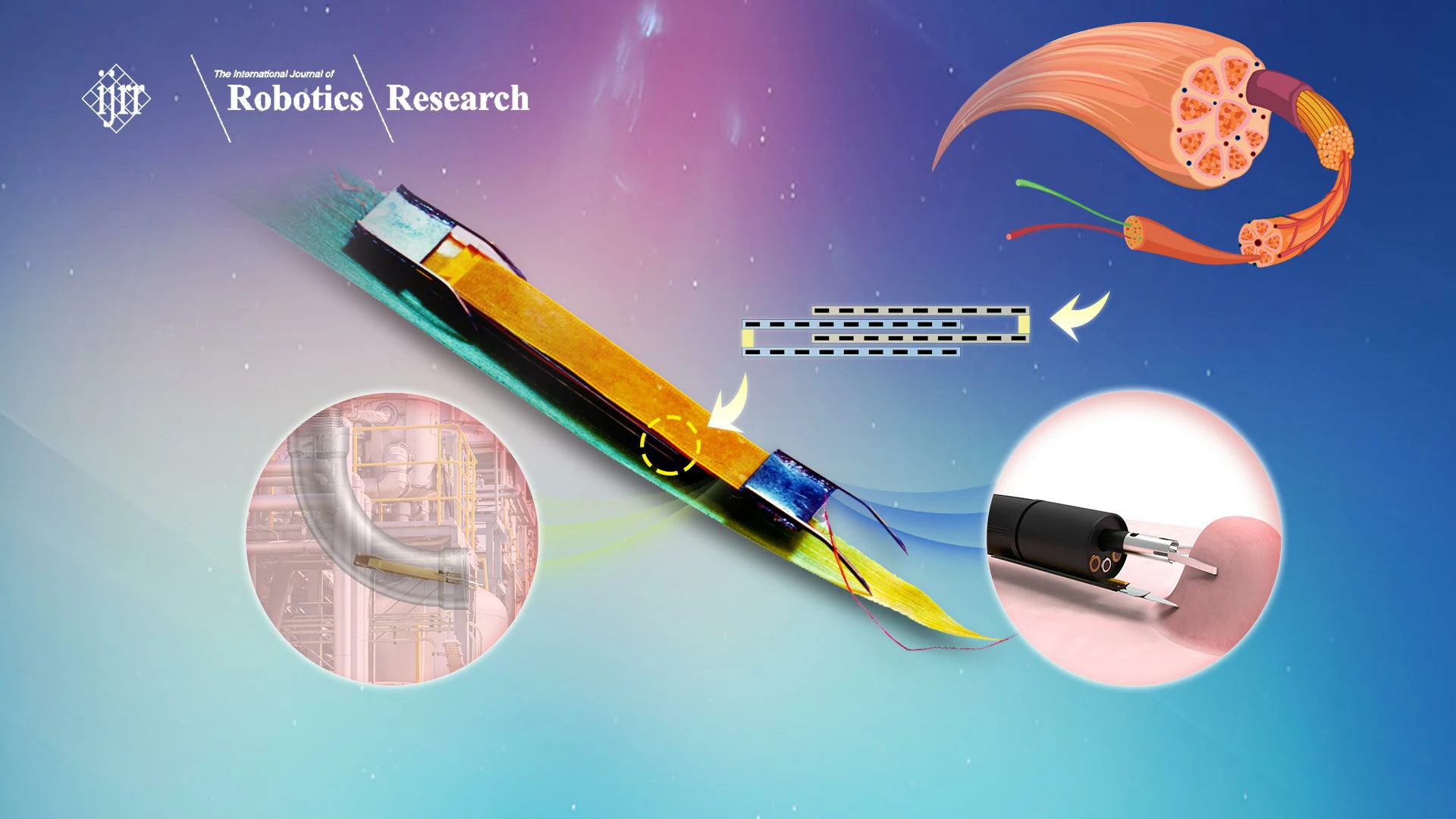
To address these problems, we have been exploring new approaches by rethinking basic principles and structures of actuators, and hence, implementing novel actuators distinguished from the conventional ones. Electrostatic actuation has drawn our great interests due to its favorable features such as scalability, flexibility, lightweight, and low profile. We implemented a series of electrostatic film actuators and, by utilizing them, developed various robots with unique features (e.g., ultra-thin flexible climbing robots). We have also studied other actuation methods, such as flexible ionic polymer-metal composites for dexterous manipulators and an explosive actuator with a considerably high force-to-weight ratio for insect-scale water-air hybrid flying robots. In our future work, we will continue with this research methodology to implement more desirable actuators by exploring the basic physical principles and utilize them to build novel and versatile robots.